cornermetric
(非推奨) イメージからのコーナー メトリクス行列の作成
cornermetric は推奨されません。代わりに、Computer Vision Toolbox™ の detectHarrisFeatures (Computer Vision Toolbox) または detectMinEigenFeatures (Computer Vision Toolbox) と cornerPoints (Computer Vision Toolbox) オブジェクトを使用してください。詳細については、バージョン履歴を参照してください。
説明
例
入力イメージをワークスペースに読み取ります。
I = imread("circles.png");コーナー メトリクス行列を生成します。フィルター係数を指定します。コーナー検出法の既定値は "Harris" です。
filter = [0.25 0.5 0.25]; C = cornermetric(I,FilterCoefficients=filter);
imregionalmax を使用して、コーナー メトリクス行列からコーナー特徴 (ピクセル) を検出します。
corner_peaks = imregionalmax(C);
検出されたコーナー ピクセルの値を [255 0 0] に設定します。
corner_idx = find(corner_peaks == true); [r,g,b] = deal(I); r(corner_idx) = 255; g(corner_idx) = 0; b(corner_idx) = 0; RGB = cat(3,r,g,b);
コーナー メトリクス行列を表示用に調整します。
C_adjusted = imadjust(C);
元のイメージ、調整されたコーナー メトリクス、および検出されたコーナー特徴をモンタージュとして表示します。検出されたコーナー特徴は、RGB 値が [255 0 0] の赤色のピクセルとして表示されます。
montage({I,C_adjusted,RGB},Size=[1 3])
title("Original Image vs. Adjusted Corner Metric Matrix vs. Detected Corner Features");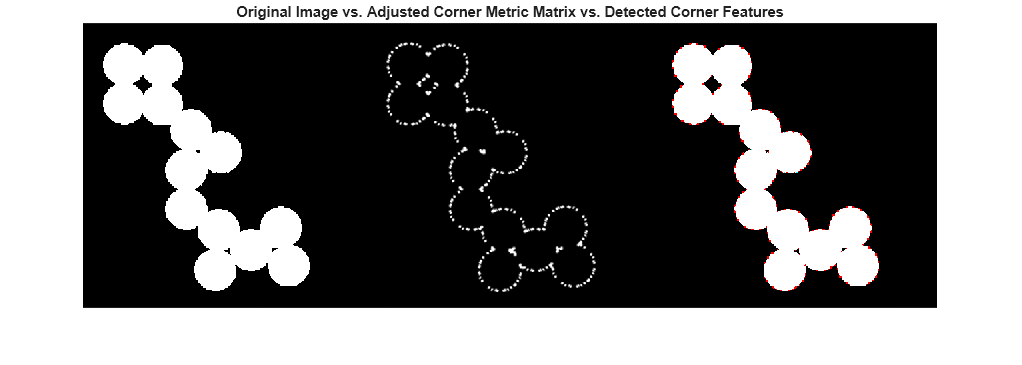
入力イメージをワークスペースに読み取ります。
I = imread("bag.png");コーナー メトリクス行列を生成します。方法を "MinimumEigenvalue" として指定します。
C = cornermetric(I,"MinimumEigenvalue");imregionalmax を使用して、コーナー メトリクス行列からコーナー特徴 (ピクセル) を検出します。
corner_peaks = imregionalmax(C);
検出されたコーナー ピクセルの値を [255 0 0] に設定します。
RGB = labeloverlay(I,corner_peaks,Transparency=0,Colormap=[1 0 0]);
コーナー メトリクス行列を表示用に調整します。
C_adjusted = imadjust(C);
元のイメージ、調整されたコーナー メトリクス、および検出されたコーナー特徴をモンタージュとして表示します。検出されたコーナー特徴は、赤色のピクセルとして表示されます。
montage({I,C_adjusted,RGB},Size=[1 3],BorderSize=5,BackgroundColor="w")
title("Original Image vs. Adjusted Corner Metric Matrix vs. Detected Corner Features");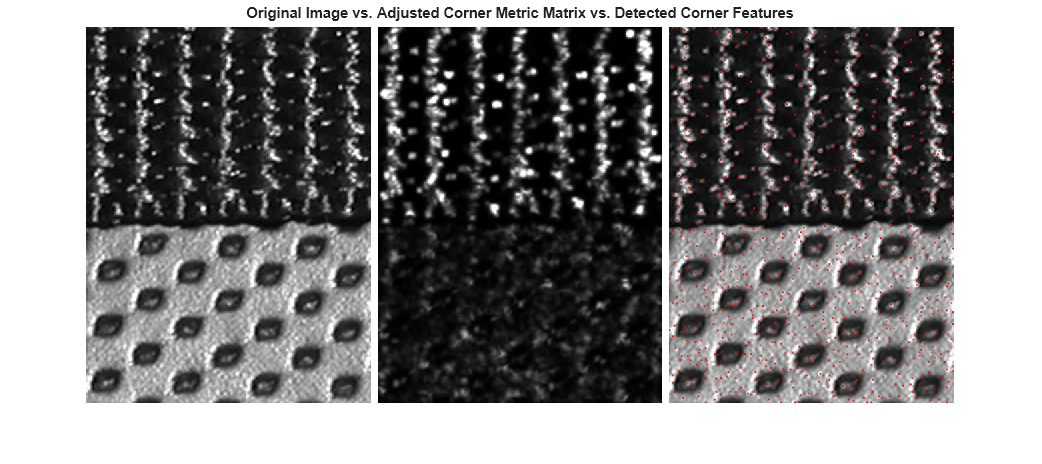
入力引数
名前と値の引数
出力引数
ヒント
関数 corner と cornermetric はいずれもイメージ内のコーナーを検出します。ほとんどの場合、1 ステップでコーナーを検出するには、効率のよい関数 corner を使用してください。コーナーの選択を厳密に制御する必要がある場合は、関数 cornermetric を使用してコーナー メトリクス行列を計算します。次に、コーナー メトリクス行列のピーク値を検出するための独自のアルゴリズムを作成します。