Simscape ハードウェアインザループ ワークフロー
Simscape™ ハードウェアインザループ (HIL) ワークフローでは、Simscape プラント モデルの HDL コードを生成し、生成されたコードを汎用のフィールド プログラマブル ゲート アレイ (FPGA)、System on a Chip (SoC)、または Speedgoat® FPGA I/O モジュールに展開できます。プラント モデルを FPGA ボードに展開することで、モデルのシミュレーションを高速化し、HIL シミュレーションを使用してモデルをリアルタイムでシミュレートできます。
Simscape HDL ワークフロー アドバイザーは、Simscape プラント モデルを HDL コード生成用の HDL 互換の実装モデルに変換します。sschdladvisor 関数を使用してアドバイザーを開き、アドバイザーでタスクを実行して HDL 実装モデルを生成できます。HDL 実装モデルを生成するとき、実装モデルのデータ型の精度 (single や double などの浮動小数点か固定小数点) を指定できます。実装モデルに妥当性確認ロジックの挿入を指定し、HDL 実装が元の Simscape アルゴリズムと数値的に一致するかを検証することもできます。
HDL 実装モデルの生成後、HDL Coder™ を使用してこのモデルのコードを生成し、生成されたコードを HDL ワークフロー アドバイザーを使用してターゲット プラットフォームに展開できます。
Simscape ハードウェアインザループ ワークフローの基本
カテゴリ
- モデルの準備
プラント モデルの準備と構成
- HDL コード生成
プラント モデルの HDL 互換 Simulink モデルの生成と HDL コードの生成
- 展開
生成された HDL コードのターゲット ハードウェアへの展開
- トラブルシューティング
ワークフローの問題に対処するためのトラブルシューティングの提案と解決法
- 用途
リアルタイム アプリケーションの例の確認
注目の例

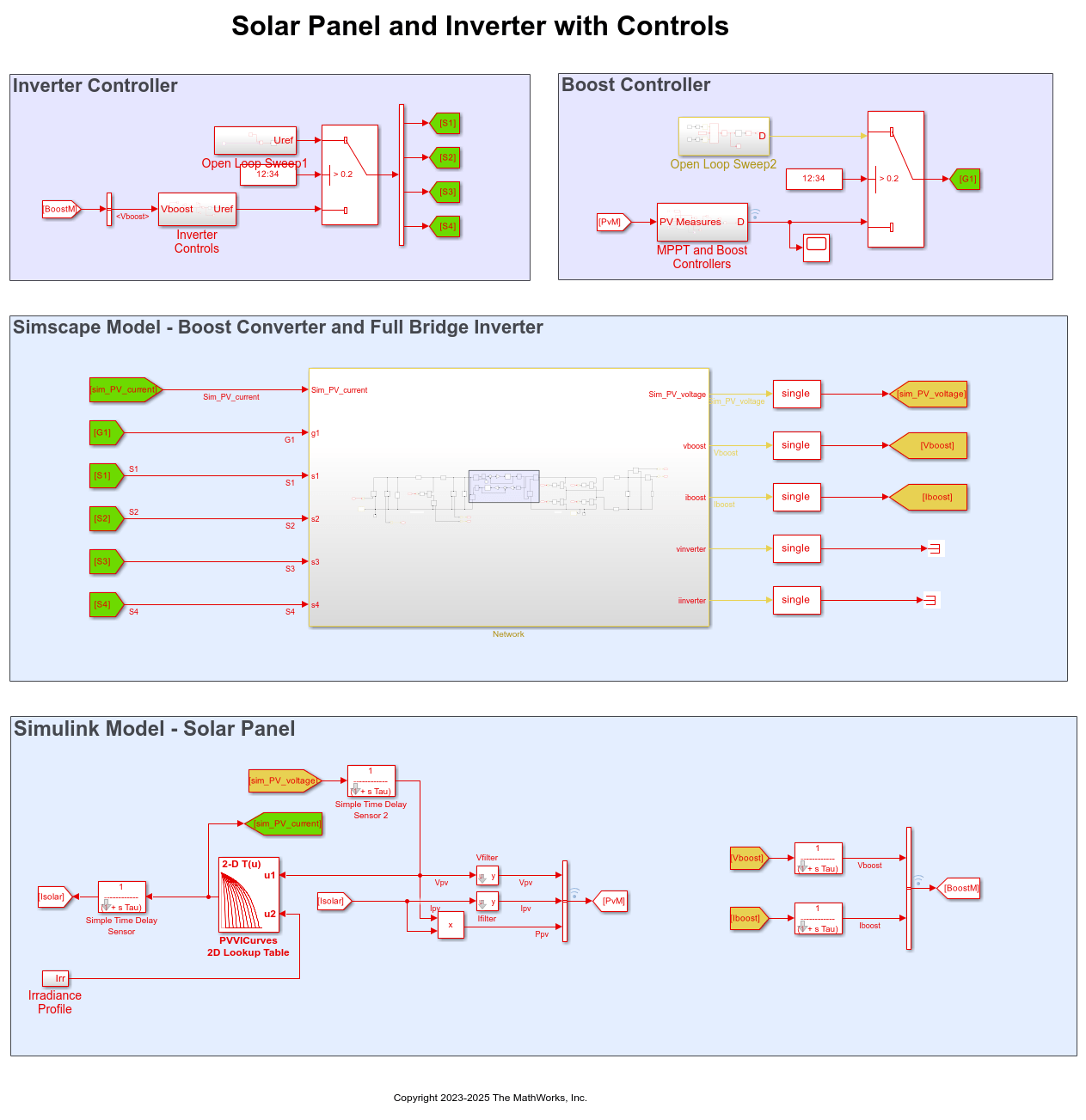
Speedgoat FPGA I/O モジュールへの Simscape モデルの FPGA ベースの HIL 展開
Simscape 半波整流器モデルから FPGA ビットストリームを合成および生成して Speedgoat FPGA I/O 334-325K ターゲットに展開する。
複数のネットワークを含む Simscape モデルの HDL コードの生成
大規模な Simscape ネットワークを複数のネットワークに分割し、HDL 実装モデルを生成する。
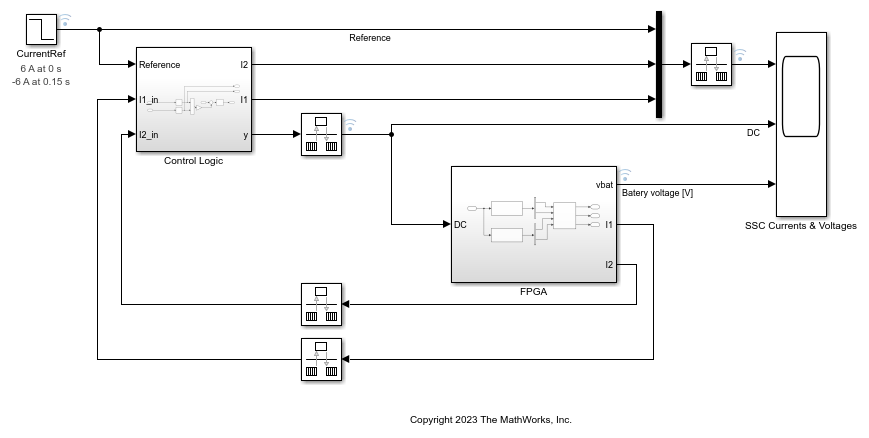
Generate FPGA Bitstream for Two-Phase DC-DC Converter with Tunable Run-Time Parameters
Generate FPGA bitstream for a Simscape model and tune the run-time parameter values.

Generate HDL Code for Simscape Models by Using Dynamic Switch Approximation
Generate HDL code and synthesize the results for a three-phase PMSM drive using Dynamic Switch Approximation method.
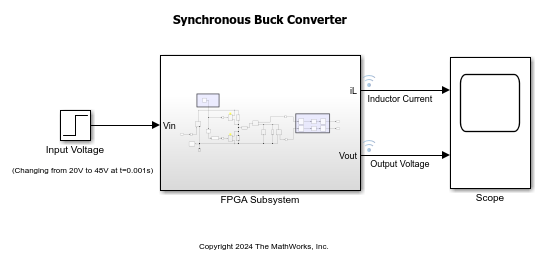
Synchronous Buck Converter for Real-Time FPGA Deployment
Model synchronous buck converter by using Simscape switches and dynamic switches for real-time simulation and deployment.
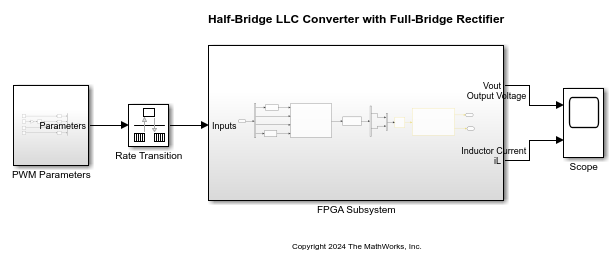
Resonant LLC Converter for Real-Time FPGA Deployment
Model a resonant LLC converter by using Simscape switches, generate HDL code and synthesize the results for real-time simulation.

Real-Time Simulation of Modular Multilevel Converter on FPGA
Model a modular multilevel converter with half-bridge power modules by using generic switching-function modeling approach, generate HDL code and deploy onto a target hardware.

Real-Time Simulation of Dual Active Bridge Converter on FPGA
Model a dual active bridge converter using dynamic switch approximation, then generate and synthesize HDL code for real‑time FPGA deployment.