LMS アルゴリズムの使用による FIR フィルターのシステム同定
システム同定は、適応フィルターを使用して未知のシステムの係数を特定するプロセスです。このプロセスの概要は、システム同定 –– 適応フィルターの使用による未知のシステムの同定に示されています。関係する主なコンポーネントは以下のとおりです。
適応フィルター アルゴリズム。この例では、
dsp.LMSFilterのMethodプロパティを'LMS'に設定して、LMS 適応フィルター アルゴリズムを選択します。適応対象となる未知のシステムまたはプロセス。この例では、
fircbandで設計されたフィルターが未知のシステムです。適応プロセスを実行する適切な入力データ。一般的な LMS モデルの場合、これらは目的の信号 と入力信号 です。
適応フィルターの目的は、適応フィルターの出力 と未知のシステム (同定対象のシステム) の出力 の間で誤差信号を最小化することです。誤差信号が最小化されると、適応させたフィルターは未知のシステムに似たものになります。両方のフィルターの係数は、ほぼ一致します。
未知のシステム
同定対象のシステムを表す dsp.FIRFilter オブジェクトを作成します。関数 fircband を使用して、フィルターの係数を設計します。設計するフィルターは、阻止帯域で 0.2 リップルに制約されているローパス フィルターです。
filt = dsp.FIRFilter; filt.Numerator = fircband(12,[0 0.4 0.5 1],[1 1 0 0],[1 0.2],... {'w' 'c'});
信号 x を FIR フィルターに渡します。目的の信号 d は、未知のシステム (FIR フィルター) の出力と加法性ノイズ信号 n の和です。
x = 0.1*randn(250,1); n = 0.01*randn(250,1); d = filt(x) + n;
適応フィルター
未知のフィルターを設計して目的の信号の準備ができたので、適応 LMS フィルター オブジェクトを作成および適用して未知のフィルターを特定します。
適応フィルター オブジェクトを準備するには、フィルターの係数を推定するための開始値と LMS のステップ サイズ (mu) が必要です。フィルター係数の推定値として、一連の非ゼロ値で始めることができます。この例では、13 個のフィルターの重みの初期値にゼロを使用します。dsp.LMSFilter の InitialConditions プロパティをフィルターの重みの目的の初期値に設定します。ステップ サイズについては、250 回の反復 (250 個の入力サンプル点) で適切に収束するための十分に大きい値と未知のフィルターを正確に推定するための十分に小さい値の間にある、0.8 が良い妥協点です。
LMS 適応アルゴリズムを使用する適応フィルターを表す dsp.LMSFilter オブジェクトを作成します。適応フィルターの長さを 13 タップ、ステップ サイズを 0.8 に設定します。
mu = 0.8;
lms = dsp.LMSFilter(13,'StepSize',mu)lms =
dsp.LMSFilter with properties:
Method: 'LMS'
Length: 13
StepSizeSource: 'Property'
StepSize: 0.8000
LeakageFactor: 1
InitialConditions: 0
AdaptInputPort: false
WeightsResetInputPort: false
WeightsOutput: 'Last'
Show all properties
一次入力信号 x と目的の信号 d を LMS フィルターに渡します。適応フィルターを稼働させて、未知のシステムを特定します。適応フィルターの出力 y は目的の信号 d に収束された信号であり、2 つの信号間の誤差 e を最小化します。
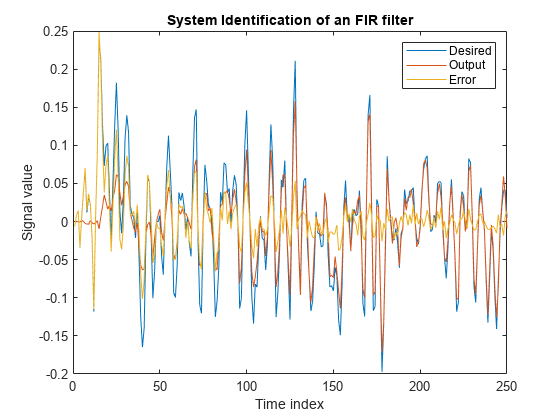
結果をプロットします。出力信号と目的の信号が期待どおりには一致しておらず、これらの間の誤差は無視できません。
[y,e,w] = lms(x,d); plot(1:250, [d,y,e]) title('System Identification of an FIR filter') legend('Desired','Output','Error') xlabel('Time index') ylabel('Signal value')
重みの比較
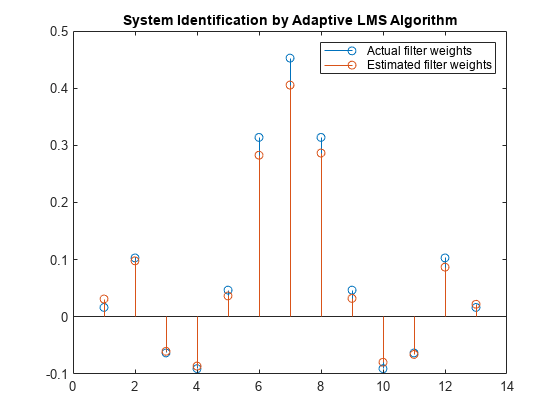
重みベクトル w は、未知のシステム (FIR フィルター) に似るように適応させた LMS フィルターの係数を表します。収束を確認するために、FIR フィルターの分子係数と適応フィルターの推定された重み付けを比較します。
前の信号プロットの結果を確認すると、推定されたフィルターの重みと実際のフィルターの重みが十分には一致していません。
stem([(filt.Numerator).' w]) title('System Identification by Adaptive LMS Algorithm') legend('Actual filter weights','Estimated filter weights',... 'Location','NorthEast')
ステップ サイズの変更
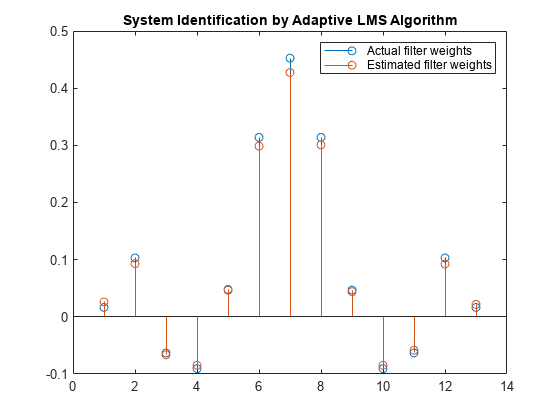
実験的に、ステップ サイズを 0.2 に変更してみます。mu = 0.2 を使用して例を繰り返すと、以下のステム プロットが出力されます。フィルターは収束せず、推定された重みは実際の重みの良好な近似にはなっていません。
mu = 0.2; lms = dsp.LMSFilter(13,'StepSize',mu); [~,~,w] = lms(x,d); stem([(filt.Numerator).' w]) title('System Identification by Adaptive LMS Algorithm') legend('Actual filter weights','Estimated filter weights',... 'Location','NorthEast')

データ サンプル数の増加
目的の信号のフレーム サイズを大きくします。これにより必要な計算量が増えますが、適応に使用できるデータがより多く LMS アルゴリズムに与えられます。信号データのサンプルを 1000 個、ステップ サイズを 0.2 にすると、係数が前より一致するようになり、収束が改善されることがわかります。
release(filt); x = 0.1*randn(1000,1); n = 0.01*randn(1000,1); d = filt(x) + n; [y,e,w] = lms(x,d); stem([(filt.Numerator).' w]) title('System Identification by Adaptive LMS Algorithm') legend('Actual filter weights','Estimated filter weights',... 'Location','NorthEast')
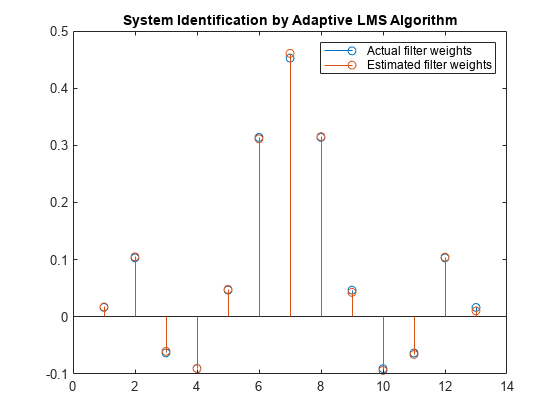
反復処理でデータを入力して、データ サンプル数をさらに増やします。1000 サンプルずつまとめて 4 回の反復で渡して、4000 サンプルのデータに対して LMS アルゴリズムを実行します。
フィルターの重みを比較します。LMS フィルターの重みが FIR フィルターの重みと非常によく一致しているので、収束が適切であることがわかります。
release(filt); n = 0.01*randn(1000,1); for index = 1:4 x = 0.1*randn(1000,1); d = filt(x) + n; [y,e,w] = lms(x,d); end stem([(filt.Numerator).' w]) title('System Identification by Adaptive LMS Algorithm') legend('Actual filter weights','Estimated filter weights',... 'Location','NorthEast')
出力信号と目的の信号が非常によく一致しており、これらの間の誤差はゼロに近くなっています。
plot(1:1000, [d,y,e]) title('System Identification of an FIR filter') legend('Desired','Output','Error') xlabel('Time index') ylabel('Signal value')

参考
オブジェクト
トピック
参照
[1] Hayes, Monson H., Statistical Digital Signal Processing and Modeling. Hoboken, NJ: John Wiley & Sons, 1996, pp.493–552.
[2] Haykin, Simon, Adaptive Filter Theory. Upper Saddle River, NJ: Prentice-Hall, Inc., 1996.