自動運転
Deep Learning Toolbox™ を Automated Driving Toolbox™ と共に使用して、自動運転アプリケーションに深層学習を適用します。
アプリ
| グラウンド トゥルース ラベラー | 自動運転アプリケーション用にグラウンド トゥルース データをラベル付け |
トピック
- 深層学習車両検出器の学習 (Automated Driving Toolbox)
深層学習を使用して視覚ベースの車両検出器に学習させる
- 単眼カメラとセマンティック セグメンテーションを使用した占有グリッドの作成
この例では、セマンティック セグメンテーションと深層学習を使用して車両周りの自由空間を推定し、占有グリッドを作成する方法を説明します。
- Automate Ground Truth Labeling for Semantic Segmentation (Automated Driving Toolbox)
Use a pretrained semantic segmentation algorithm to segment an image, and use this algorithm to automate ground truth labeling.
- 3 次元シミュレーション データを使用した深層学習セマンティック セグメンテーション ネットワークの学習
この例では、3 次元シミュレーション データを使用してセマンティック セグメンテーション ネットワークに学習させ、敵対的生成ネットワーク (GAN) を使用して現実のデータに合わせて微調整する方法を示します。
- Track Multiple Vehicles Using a Camera (Automated Driving Toolbox)
Detect and track multiple vehicles with a monocular camera mounted in a vehicle.
注目の例

3 次元シミュレーション データを使用した深層学習セマンティック セグメンテーション ネットワークの学習
この例では、3 次元シミュレーション データを使用してセマンティック セグメンテーション ネットワークに学習させ、敵対的生成ネットワーク (GAN) を使用して現実のデータに合わせて微調整する方法を示します。

単眼カメラとセマンティック セグメンテーションを使用した占有グリッドの作成
この例では、セマンティック セグメンテーションと深層学習を使用して車両周りの自由空間を推定し、占有グリッドを作成する方法を説明します。その後、この占有グリッドを使用してパス計画に使用可能な車両コストマップを作成します。
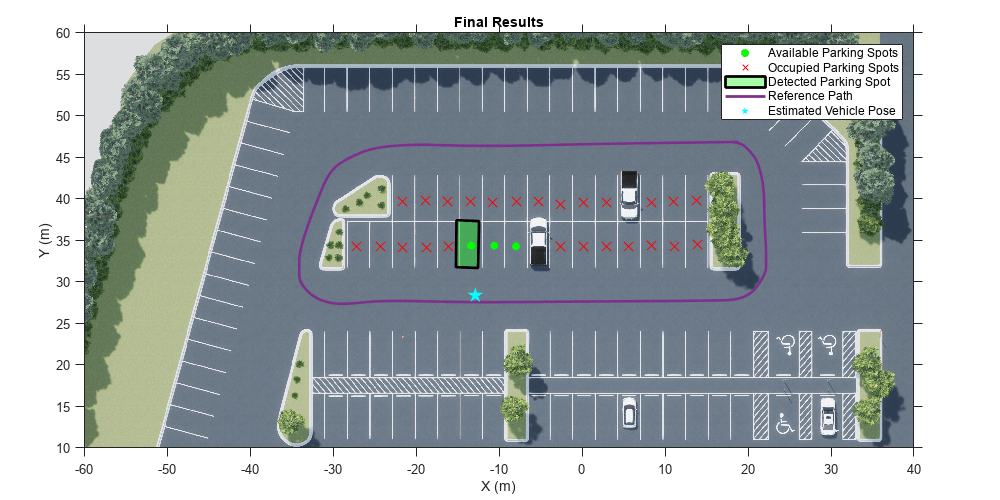
Perception Based Live Parking Spot Detection Using Unreal Engine Simulation
Develop a live parking spot detection system using deep learning and SLAM.