時間領域応答データとプロット
この例では、動的システム モデルからステップ応答データとインパルス応答データ、およびステップ応答プロットとインパルス応答プロットを取得する方法を示します。
伝達関数モデルを作成して、 = 0 でステップ入力にその応答をプロットします。
H = tf([8 18 32],[1 6 14 24]); step(H);
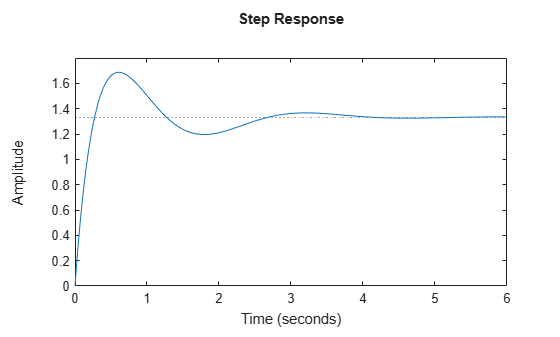
出力引数を指定せずに step を呼び出すと、ステップ応答が画面上にプロットされます。プロットする時間範囲を指定しない限り、step はシステム ダイナミクスを示す時間範囲を自動的に選択します。
= 0 (ステップ入力の適用) から = 8 秒までのステップ応答データを計算します。
[y,t] = step(H,8);
出力引数を指定して step を呼び出すと、コマンドはステップ応答データ y を返します。ベクトル t には対応する時間値が含まれています。
= 0 で適用されたインパルス入力への H の応答をプロットします。グリッドを使用して応答をプロットします。
impulseplot(H)
grid on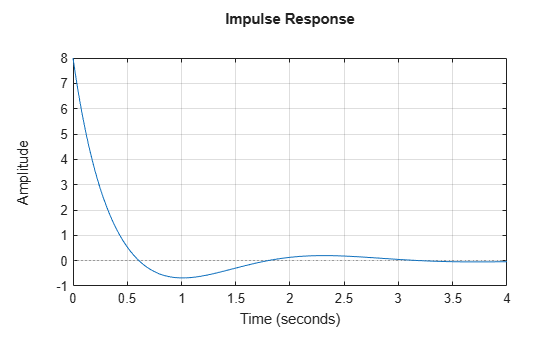
= 1 (インパルス入力の適用後 1 秒) から = 3 秒までのインパルス応答データの 200 点を計算します。
[y,t] = impulse(H,linspace(1,3,200));
step については、時間ベクトルを省略して、impulse に時間範囲を自動選択させることができます。
参考
step | impulse | stepplot | impulseplot | timeoptions