連続時間開ループ モデルのむだ時間近似
この例では、padeを使用して連続時間開ループ システムで遅延を近似する方法を示します。
パデ近似は、むだ時間をサポートしていない解析または設計ツールを使用するときに便利です。使用する近似次数が高すぎると、数値的問題が発生し、極が不安定になる可能性があります。そのため、次数 N>10 のパデ近似は回避します。
サンプル開ループ システムを出力遅延で作成します。
s = tf('s');
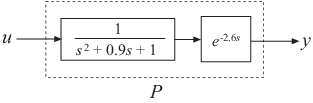
P = exp(-2.6*s)/(s^2+0.9*s+1);P は、むだ時間をもつ 2 次伝達関数 (tf) オブジェクトです。
P の 1 次パデ近似を計算します。
Pnd1 = pade(P,1)
Pnd1 =
-s + 0.7692
----------------------------------
s^3 + 1.669 s^2 + 1.692 s + 0.7692
Continuous-time transfer function.
Model Properties
このコマンドは、1 次近似で P のすべてのむだ時間を置き換えます。そのため、Pnd1 は遅延のない 3 次伝達関数になります。
bodeplot を使用して、元のモデルと近似モデルの周波数応答を比較します。
bp = bodeplot(P,'-b',Pnd1,'-.r',{0.1,10}); bp.PhaseMatchingEnabled = 'on'; legend('Exact delay','First-Order Pade','Location','SouthWest');
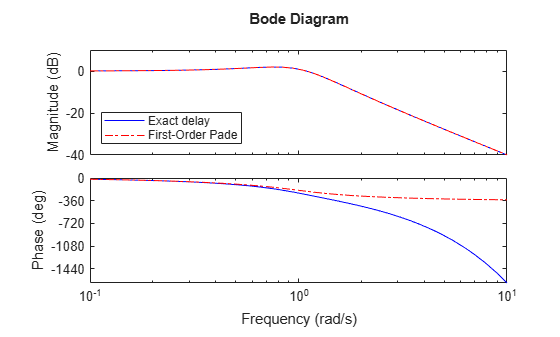
P と Pnd1 の振幅は正確に一致します。ただし、Pnd1 の位相は、約 1 rad/s を超える P の位相から逸脱します。
パデ近似次数を増やすことで、位相近似が良好である周波数帯域が拡張されます。
Pnd3 = pade(P,3);
P、Pnd1、および Pnd3 の周波数応答を比較します。
bp = bodeplot(P,'-b',Pnd3,'-.r',Pnd1,':k',{0.1 10})
bp =
BodePlot (Bode Diagram) with properties:
Responses: [3×1 controllib.chart.response.BodeResponse]
Characteristics: [1×1 controllib.chart.options.CharacteristicsManager]
FrequencyUnit: "rad/s"
FrequencyScale: "log"
MagnitudeVisible: on
PhaseVisible: on
MagnitudeScale: "linear"
MagnitudeUnit: "dB"
PhaseUnit: "deg"
MinimumGainEnabled: off
MinimumGainValue: 0
PhaseWrappingEnabled: off
PhaseWrappingBranch: -180
PhaseMatchingEnabled: off
PhaseMatchingFrequency: 0
PhaseMatchingValue: 0
Visible: on
Show all properties
bp.PhaseMatchingEnabled = 'on'; legend('Exact delay','Third-Order Pade','First-Order Pade',... 'Location','SouthWest');
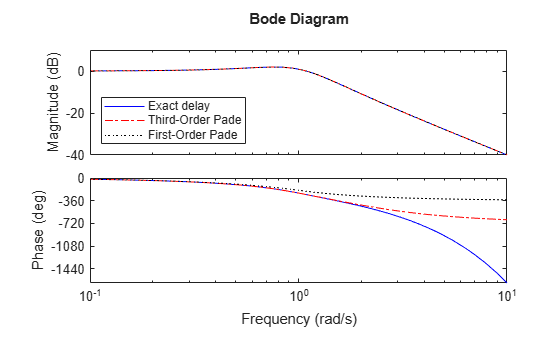
位相近似誤差は、3 次パデ近似を使用することで減少します。
stepplot を使用して、元のシステムと近似システムの時間領域応答を比較します。
stepplot(P,'-b',Pnd3,'-.r',Pnd1,':k') legend('Exact delay','Third-Order Pade','First-Order Pade',... 'Location','Southeast');

パデ近似の使用によって、初期遷移応答での非最小位相部分 (「逆行」現象) が導入されます。この現象は 1 次の近似では非常に顕著に現れ、方向を変更する前に大幅に減少してゼロ未満になります。より高次の近似ではこの現象は低減され、システムの正確な応答に対してより厳密な近似が得られます。