制御システムの調整における安定余裕
制御システムの調整では、ターゲットのゲイン余裕と位相余裕を余裕目標 (制御システム調整器の場合) または TuningGoal.Margins (systune の場合) を使用して指定します。このソフトウェアには、調整されたシステムのゲイン余裕と位相余裕を可視化して解釈するのに役立つツールが用意されています。
ゲイン余裕と位相余裕
ゲイン余裕と位相余裕は、開ループ システム応答における変動に対する制御ループの許容誤差を測定します。[余裕目標] と TuningGoal.Margins では、"ディスク余裕" の概念に基づいてゲイン余裕と位相余裕を計算します。従来のゲイン余裕および位相余裕と同様に、ディスク余裕は、開ループ応答におけるゲインまたは位相の変動に対して閉ループ システムの安定性を定量化します。また、ディスク余裕はすべての周波数とループの交互作用を考慮します。そのため、ディスクベースの余裕解析は、従来のゲイン余裕と位相余裕よりも強力な安定性の保証をもたらします。ディスク余裕の詳細については、Stability Analysis Using Disk Margins (Robust Control Toolbox)を参照してください。
SISO システムの場合、ゲイン余裕と位相余裕は、開ループ応答 L のゲインまたは位相が安定性を失わずにどの程度変化できるかを示します。
MIMO システムの場合、ゲイン余裕と位相余裕は次のように解釈されます。
ゲイン余裕 — ゲインがそれぞれのフィードバック チャネルでゲイン余裕の値に達するまで変化する場合に、安定性は維持されます。ゲインはすべてのチャネルで同時に変化する可能性があり、また、各チャネルで異なる変化量となることがあります。
位相余裕 — 位相がそれぞれのフィードバック チャネルで位相余裕の値に達するまで変化する場合に、安定性は維持されます。位相はすべてのチャネルで同時に変化する可能性があり、また、各チャネルで異なる変化量となることがあります。
通常、ゲイン余裕と位相余裕は周波数全体で異なります。たとえば、SISO ループにおいて、ゲイン余裕が 2 rad/s で 5 dB の場合は、ループ ゲインがこの周波数で増加または減少しても、5 dB 以内の増減であれば閉ループの安定性は維持されます。制御システムの調整においては、全周波数で最小 (最悪) の余裕に対するターゲット値を指定します。余裕の調整目標では、変動の範囲が ±5 dB や ±30° のように対称であると想定します。
ゲイン余裕と位相余裕のプロットの解釈
制御システムの調整においては、システムの安定余裕を可視化すると、調整されたシステムの性能を評価するのに役立ちます。
制御システム調整器では、余裕目標またはクイック ループ調整を使用します。
コマンド ラインでは
viewGoalを使用します。たとえば、制御システムがSでTuningGoal.Marginsの目標がReqの場合は次のように入力します。viewGoal(Req,S)
viewGoal のプロットでは、ターゲット余裕を満たしていない領域が黄色の影付きで表示されます。プロットには、制御システムの調整可能なパラメーターの現在の値に対するゲイン余裕と位相余裕も示されます。これらの余裕は青色のトレースで示され、通常は周波数全体で変わります。たとえば、次のプロットは典型的な結果を示しています。
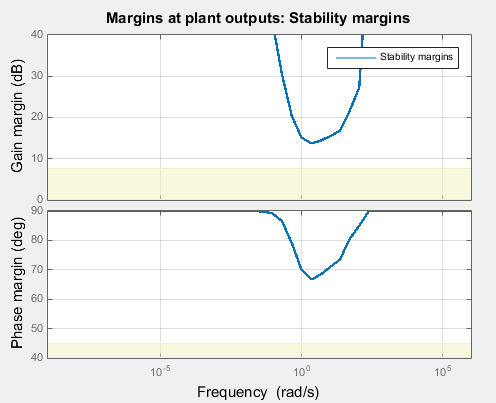
プロットは、システムが不安定になることなく許容できる摂動の大きさに、ゲインまたは位相の変動の周波数が影響する可能性があることを示しています。ゲイン余裕と位相余裕は、約 2 rad/s で最小 (最悪) になっています。この周波数において、システムは開ループ ゲインの変化を約 ±14 dB まで、位相の変化を約 ±66° まで許容できます。このシステムでは、すべての周波数における余裕が、黄色で示された調整に使用されるターゲット余裕を十分に超えています。
ゲインと位相の同時変動
一般に、ゲイン余裕は位相変動がないものとして判定され、位相余裕はゲイン変動がないものとして判定されます。実際には、ゲイン変動と位相変動がシステムで同時に起こることがあります。ディスクベースの余裕解析では、ゲインと位相の同時変動のシステムが許容できる範囲も提供されます。たとえば、システムのディスクベースのゲイン余裕が 5 dB であるとします。このシステムでは、位相変動がないとすると、ゲインが ±5 dB まで変化しても安定性が維持されます。diskmarginplot (Robust Control Toolbox) コマンドを使用して、ゲインと位相の同時変動をシステムが許容できる領域を可視化します。
diskmarginplot(db2mag(5))
![Plot of simultaneous gain and phase variation for a system with disk-based gain margin DGM = [0.56,1.8] and disk-based phase margin DPM = 31°.](margins_robustness.png)
影付きの領域は、ディスクベースのゲイン余裕が 5 dB の場合に、安定性が維持されるゲインと位相の変動の組み合わせの範囲を示しています。位相変動がなければ、システムは –5 dB から 5 dB までの全範囲のゲイン変動、または DGM = [0.56,1.8] の範囲内の係数によるゲインの変化を許容できます。これに位相変動が加わると、許容できるゲイン変動が少なくなります。たとえば、位相が ±25° の範囲で変化するとすると、許容できるゲイン変動の範囲は約 ±3 dB まで下がります。ディスクベースの位相余裕は、ゲイン変動がない場合に許容できる位相変動であり、この例では約 ±31° です (プロットに DPM として示されています)。
ディスク余裕の詳細については、Stability Analysis Using Disk Margins (Robust Control Toolbox)を参照してください。
アルゴリズム
ゲイン余裕と位相余裕の値はどちらもディスク余裕から派生しています。ディスク余裕は、臨界点付近を中心とする円形の排他的領域の半径を測定します。(Stability Analysis Using Disk Margins (Robust Control Toolbox)を参照。)開ループ応答 L(jω) をもつシステムの場合、この半径 ɑ はスケーリングされたノルムの関数です。
従来のゲイン余裕と位相余裕とは異なり、ディスク余裕および関連するゲイン余裕と位相余裕を使用すると、すべての周波数で開ループ応答が臨界点から安全な距離を置くようになります。
スケーリングの影響
ゲイン余裕と位相余裕の周波数依存は、μ 解析を伴う正確な計算で取得できます。ただし、計算の効率化のために、調整アルゴリズムでは、周波数依存のスケーリング D(jω) の代わりに定数スケーリング D による近似計算を使用します。
この近似は 1/ɑ の上限か ɑ の下限となります。そのため、周波数範囲の一部、特に余裕が最小となる周波数から離れた周波数において、余裕が小さくなることがあります。小さくなった余裕も保証された余裕ですが、実際の余裕に比べると控えめなものになります。調整アルゴリズムで使用されている下限を確認するには、安全余裕のプロットを右クリックして [システム] 、 [調整された下限] を選択します。
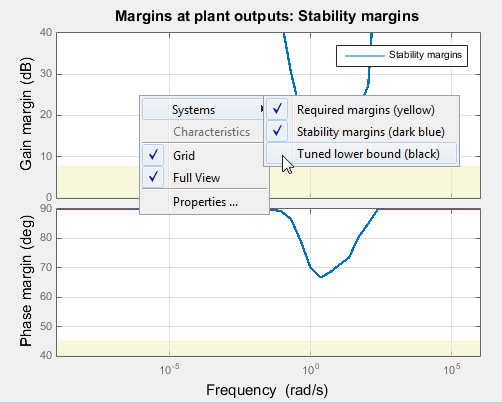
調整されたシステムの実際の余裕 (青色の曲線) と調整に使用された下限の近似 (黒色の曲線) に大きなギャップが見られる場合は、D スケーリング次数を大きくしてスケーリングに周波数依存を導入してみてください。制御システム調整器で調整する場合は、[余裕目標] ダイアログ ボックスで D スケーリング次数を設定します。コマンド ラインで調整する場合は、TuningGoal.Margins の ScalingOrder プロパティを使用してこの値を設定します。既定の次数は 0 です (静的スケーリング)。
参考
TuningGoal.Margins | diskmargin (Robust Control Toolbox) | viewGoal
トピック
- ループ整形と安定余裕の仕様
- 余裕目標
- Stability Analysis Using Disk Margins (Robust Control Toolbox)