離散時間モデルでのむだ時間の 1/z の因子への変換
この例では、離散時間モデルのむだ時間を 1/_z_ の因子に変換する方法を説明します。
離散時間モデルでは、1 サンプリング間隔のむだ時間はモデルの 1/_z_ (z = 0 の極) の因子と等価です。そのため、離散時間モデルの InputDelay、OutputDelay、または IODelay プロパティに格納されたむだ時間は、z = 0 で極として書き直すことによってモデル ダイナミクスで書き直すことができます。ただし、追加の極はシステムの次数を増やします。特に、長いむだ時間では、これは非常に高次のシステムを生み出す可能性があり、長い計算時間や数値誤差を招きます。
離散時間閉ループ モデルでむだ時間を無くす方法を示し、それを行う効果を確認するために、次の閉ループ システムを作成します。
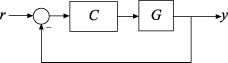
G は入力遅延のある 1 次離散時間システムであり、C は PI コントローラーです。
G = ss(0.9,0.125,0.08,0,'Ts',0.01,'InputDelay',7); C = pid(6,90,0,0,'Ts',0.01); T = feedback(C*G,1);
入力遅延のあるプラントでフィードバック ループを閉じると、閉ループ システムで内部遅延が発生します。T の次数と内部遅延を調べます。
order(T)
ans = 2
T.InternalDelay
ans = 7
T は 2 次状態空間モデルです。1 つの状態は 1 次プラントが影響し、もう 1 つの状態は PI コントローラーの 1 つの極が影響します。遅延により、T の次数が増加することはありません。代わりに、7 つのタイム ステップの内部遅延として表されます。
内部遅延を で置き換えます。
Tnd = absorbDelay(T);
このコマンドは、内部遅延を z = 0 において 7 つの極に変換します。これを確認するには、Tnd の次数と内部遅延を調べます。
order(Tnd)
ans = 9
Tnd.InternalDelay
ans = 0×1 empty double column vector
Tnd には内部遅延はありませんが、7 単位遅延をモデル ダイナミクスに吸収することによって導入された 7 つの余分な極のために、9 次モデルになります。
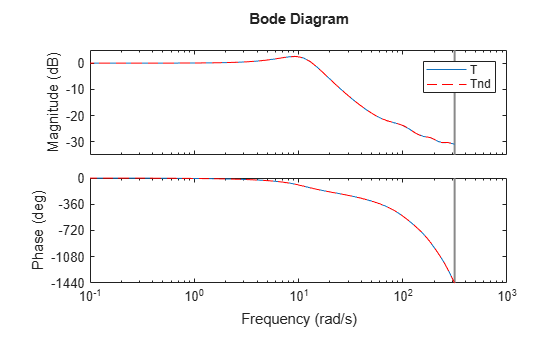
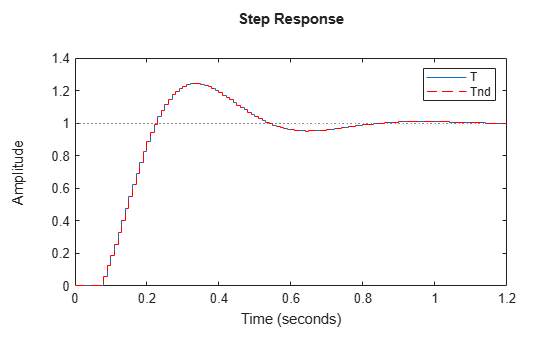
このような表現の違いはありますが、Tnd の応答は T の応答と厳密に一致します。
stepplot(T,Tnd,'r--') legend('T','Tnd');
bodeplot(T,Tnd,'r--') legend('T','Tnd');