predict
拡張カルマン フィルター、アンセンテッド カルマン フィルター、または粒子フィルターを使用した次のタイム ステップにおける状態および状態推定誤差の共分散の予測
構文
説明
predict コマンドは、次のタイム ステップで extendedKalmanFilter オブジェクト、unscentedKalmanFilter オブジェクトまたは particleFilter オブジェクトの状態および状態推定誤差の共分散を予測します。拡張カルマン フィルター アルゴリズムまたはアンセンテッド カルマン フィルター アルゴリズムを実装するには、predict コマンドと correct コマンドを一緒に使用します。現在の出力測定値が存在する場合、predict と correct を使用できます。測定値がない場合は、predict のみを使用できます。コマンドの使用順序の詳細については、predict コマンドと correct コマンドの使用を参照してください。
[ は、次のタイム ステップで拡張カルマン フィルター オブジェクト、アンセンテッド カルマン フィルター オブジェクト、または粒子フィルター オブジェクト PredictedState,PredictedStateCovariance] = predict(obj)obj の状態推定および状態推定誤差の共分散を予測します。
extendedKalmanFilter コマンド、unscentedKalmanFilter コマンド、または particleFilter コマンドを使用して obj を作成します。非線形システムの状態遷移関数と測定関数を obj に指定します。また、これらの関数においてプロセス ノイズ項と測定ノイズ項が加法性であるか非加法性であるかを指定します。オブジェクトの State プロパティには最新の推定状態値が格納されます。タイム ステップ k で、obj.State が であると仮定します。この値は、時間 k の状態推定であり、時間 k までに測定された出力を使用して推定されます。predict コマンドを使用すると、PredictedState 出力に が返されます。 は時間 k+1 の状態推定であり、時間 k までに測定された出力を使用して推定されます。コマンドは の状態推定誤差の共分散を PredictedStateCovariance 出力に返します。ソフトウェアはまた、これらの修正された値をもつ obj の State プロパティと StateCovariance プロパティを更新します。
obj.StateTransitionFcn で指定した状態遷移関数 f が次のいずれかの形式をとる場合、この構文を使用します。
x(k) = f(x(k-1))— 加法性プロセス ノイズの場合。x(k) = f(x(k-1),w(k-1))— 非加法性プロセス ノイズの場合。
ここで x と w はシステムの状態とプロセス ノイズです。f への入力は、状態とプロセス ノイズのみです。
システムの状態遷移関数にこれらの入力が必要な場合、[ は追加の入力引数を指定します。複数の引数を指定できます。PredictedState,PredictedStateCovariance] = predict(obj,Us1,...Usn)
状態遷移関数 f が次のいずれかの形式をとる場合、この構文を使用します。
x(k) = f(x(k-1),Us1,...Usn)— 加法性プロセス ノイズの場合。x(k) = f(x(k-1),w(k-1),Us1,...Usn)— 非加法性プロセス ノイズの場合。
例
アンセンテッド カルマン フィルター アルゴリズムと測定出力データを使用して、ファン デル ポール振動子の状態を推定します。振動子には 2 つの状態と 1 つの出力があります。
振動子のアンセンテッド カルマン フィルター オブジェクトを作成します。前に記述して保存した状態遷移関数 vdpStateFcn.m と測定関数 vdpMeasurementFcn.m を使用します。これらの関数は、1 と等しい非線形パラメーター mu を使用して、ファン デル ポール振動子への離散近似を記述します。これらの関数は、システム内の加法性プロセスと測定ノイズを仮定します。2 つの状態の初期状態の値を [1;0] と指定します。これは、時間 k-1 までのシステム出力に関する情報を使用して、初期時間 k における状態を推定した値 です。
obj = unscentedKalmanFilter(@vdpStateFcn,@vdpMeasurementFcn,[1;0]);
振動子から測定出力データ y を読み込みます。この例では、説明のためにシミュレーションされた静的データを使用します。データは、vdp_data.mat ファイルに保存されています。
load vdp_data.mat y
振動子のプロセス ノイズ共分散と測定ノイズ共分散を指定します。
obj.ProcessNoise = 0.01; obj.MeasurementNoise = 0.16;
配列を初期化して、推定の結果を取得します。
residBuf = []; xcorBuf = []; xpredBuf = [];
アンセンテッド カルマン フィルター アルゴリズムを実装し、correct コマンドと predict コマンドを使用して振動子の状態を推定します。最初に、時間 k における測定値を使用して を修正し、 を取得します。次に、時間 k までの測定値を使用して推定されたタイム ステップ k における状態推定 を使用して、次のタイム ステップにおける状態値 を予測します。
リアルタイムのデータ測定をシミュレートするには、一度に 1 つのタイム ステップの測定データを使用します。予測値と実際の測定値の残差を計算して、フィルターの実行と収束がどの程度適切であるか評価します。残差の計算はオプションのステップです。residual を使用する場合は、correct コマンドの直前にこのコマンドを置きます。予測が測定値と一致した場合、残差はゼロです。
タイム ステップのリアルタイム コマンドを実行した後に、結果をバッファー処理して、実行が完了した後に結果をプロットできます。
for k = 1:length(y) [Residual,ResidualCovariance] = residual(obj,y(k)); [CorrectedState,CorrectedStateCovariance] = correct(obj,y(k)); [PredictedState,PredictedStateCovariance] = predict(obj); residBuf(k,:) = Residual; xcorBuf(k,:) = CorrectedState'; xpredBuf(k,:) = PredictedState'; end
correct コマンドを使用すると、obj.State および obj.StateCovariance は、タイム ステップ k での修正済み状態値 CorrectedState と修正済み状態推定誤差の共分散値 CorrectedStateCovariance で更新されます。predict コマンドを使用すると、obj.State および obj.StateCovariance は、タイム ステップ k+1 での予測値 PredictedState と PredictedStateCovariance で更新されます。
この例では、初期状態値が (つまり、時間 k-1 までのシステム出力を使用した初期時間 k での状態推定値) であったため、predict の前に correct を使用しました。初期状態の値が (つまり、k-1 までの測定値を使用した前の時間 k-1 での値) である場合は、最初に predict コマンドを使用します。predict と correct の使用順序の詳細については、predict コマンドと correct コマンドの使用を参照してください。
修正後の値を使用して、推定状態をプロットします。
plot(xcorBuf(:,1),xcorBuf(:,2))
title("Estimated States")
実際の測定値、修正された推定測定値、および残差をプロットします。vdpMeasurementFcn の測定関数の場合、測定値が最初の状態になります。
M = [y,xcorBuf(:,1),residBuf]; plot(M) grid on title("Actual and Estimated Measurements, Residual") legend("Measured","Estimated","Residual")
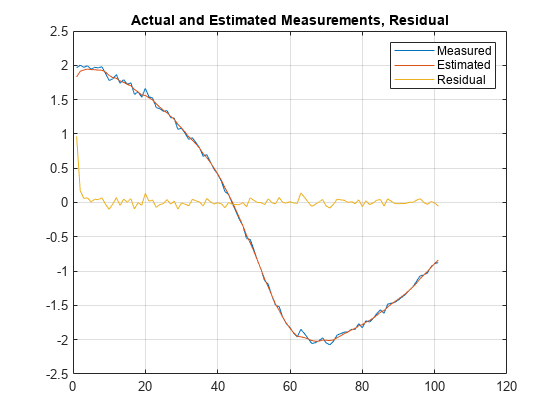
推定値は測定値に近接して追跡します。初期の過渡状態の後、残差は実行全体で比較的小さく維持されます。
ファン デル ポールの ODE データを読み込み、サンプル時間を指定します。
vdpODEdata.mat には、非線形パラメーター mu=1 で、ode45 を使用し、初期条件 [2;0] をもつファン デル ポール ODE のシミュレーションが含まれています。実際の状態はサンプル時間 dt = 0.05 で抽出されたものです。
load ('vdpODEdata.mat','xTrue','dt') tSpan = 0:dt:5;
測定値を取得します。この例では、センサーが、標準偏差 0.04 のガウス ノイズをもつ最初の状態を測定します。
sqrtR = 0.04; yMeas = xTrue(:,1) + sqrtR*randn(numel(tSpan),1);
粒子フィルターを作成して、状態遷移関数と測定尤度関数を設定します。
myPF = particleFilter(@vdpParticleFilterStateFcn,@vdpMeasurementLikelihoodFcn);
粒子フィルターを状態 [2; 0] で単位共分散を使って初期化し、1000 個の粒子を使用します。
initialize(myPF,1000,[2;0],eye(2));
mean 状態推定法と systematic リサンプリング法を選択します。
myPF.StateEstimationMethod = 'mean'; myPF.ResamplingMethod = 'systematic';
correct コマンドと predict コマンドを使用して状態を推定し、推定された状態を保存します。
xEst = zeros(size(xTrue)); for k=1:size(xTrue,1) xEst(k,:) = correct(myPF,yMeas(k)); predict(myPF); end
結果をプロットして、推定された状態と実際の状態を比較します。
figure(1) plot(xTrue(:,1),xTrue(:,2),'x',xEst(:,1),xEst(:,2),'ro') legend('True','Estimated')

次の状態遷移方程式と測定方程式に従って状態 x と測定値 y が変化するような入力 u をもつ、非線形システムについて考えます。
システムのプロセス ノイズ w は加法性で、測定ノイズ v は非加法性です。
システムの状態遷移関数と測定関数を作成します。追加入力 u を使用して関数を指定します。
f = @(x,u)(sqrt(x+u)); h = @(x,v,u)(x+2*u+v^2);
f と h は状態遷移関数と測定関数をそれぞれ保存する無名関数に対する関数ハンドルです。測定関数では、測定ノイズが非加法性であるため、v も入力として指定されます。追加入力 u の前に、v が入力として指定されることに注意してください。
指定した関数を使用して、非線形システムの状態を推定するために拡張カルマン フィルター オブジェクトを作成します。状態の初期値を 1、測定ノイズを非加法性として指定します。
obj = extendedKalmanFilter(f,h,1,'HasAdditiveMeasurementNoise',false);測定ノイズ共分散を指定します。
obj.MeasurementNoise = 0.01;
これで、predict コマンドと correct コマンドを使用して、システムの状態を推定できます。u の値を predict と correct に渡すと、状態遷移関数と測定関数にそれぞれ渡されます。
タイム ステップ k で測定値 y[k]=0.8 と入力 u[k]=0.2 を使用して状態推定値を修正します。
correct(obj,0.8,0.2)
次のタイム ステップで u[k]=0.2 が与えられた場合の状態を予測します。
predict(obj,0.2)
予測値と測定値の誤差、つまり "残差" を取得します。
[Residual, ResidualCovariance] = residual(obj,0.8,0.2);
入力引数
出力引数
詳細
バージョン履歴
R2016b で導入