getPIDLoopResponse
PID コントローラーをもつシステムの閉ループ応答と開ループ応答
説明

例
SISO プラント用の PI コントローラーを設計し、設定値追従と外乱の抑制についてその性能を調べます。設定値追従には "closed-loop" 応答を使用します。負荷外乱の抑制には "input-disturbance" を使用します。
G = tf(1,[1 1 1]); C = pidtune(G,'PI'); Tref = getPIDLoopResponse(C,G,"closed-loop"); Tdist = getPIDLoopResponse(C,G,"input-disturbance"); step(Tref,Tdist) legend("Reference Tracking","Disturbance Rejection")
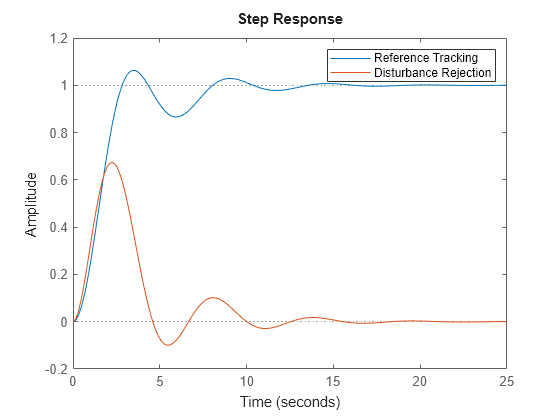
抽出された応答を、整定時間とオーバーシュートの設計要件と比較することにより、調整コントローラーを検証します。
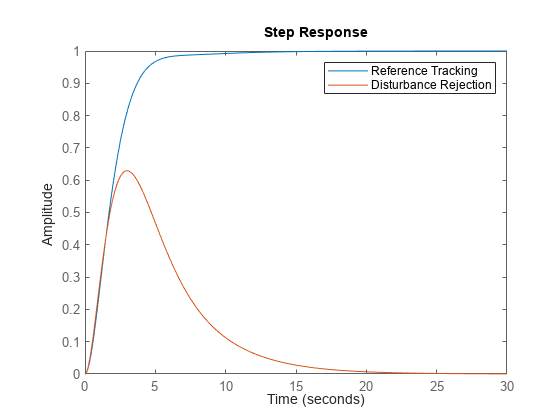
プラント用の自由度 2 (2-DOF) の PID コントローラーを設計し、設定値追従と外乱の抑制についてその性能を調べます。設定値追従には "closed-loop" 応答を使用します。負荷外乱の抑制には "input-disturbance" を使用します。
G = tf(1,[1 0.5 0.1]); w0 = 1.5; C = pidtune(G,'PID2',w0); Tref = getPIDLoopResponse(C,G,"closed-loop"); Tdist = getPIDLoopResponse(C,G,"input-disturbance"); step(Tref,Tdist) legend("Reference Tracking","Disturbance Rejection")
入力引数
出力引数
バージョン履歴
R2019a で導入