同定されたプラントの構造の選択
PID 調整器は、プラントのダイナミクスを表現するために、プロセス モデルと状態空間モデルの 2 種類のモデル構造を提供します。
システムの特性に関する知識と、使用目的に必要な精度のレベルに基づいて、モデル構造を選択してください。事前情報がない場合、実験で得られたシステムのステップ応答と周波数応答を解析して、ダイナミクスの次数や遅延について調べることができます。詳細については、System Identification Toolbox™ ドキュメンテーションで以下を参照してください。
選択する各モデル構造には関連付けられた動的な要素、すなわち "モデル パラメーター" があります。これらのパラメーターの値を手動または自動で調整して、測定またはシミュレートされた応答データに十分に一致する同定モデルを見つけます。多くの場合、どの構造を使用するのが一番良いかを判断できないときは最もシンプルなモデル構造である 1 極の伝達関数から始めるのがよいでしょう。プラントの応答と測定された出力との間で十分な一致が得られるまで、徐々に高次の構造を使用して同定を試みることができます。状態空間モデル構造を使用すると、入出力データの解析に基づいて自動的に最適なモデルの次数を求めることができます。
プラントの同定タスクを開始すると、既定では 1 つの実極をもつ伝達関数モデル構造が選択されます。この既定の設定はデータの性質によって変わるものではないため、使用目的に即していない可能性があります。そのため、パラメーターの同定を実行する前に適切なモデル構造を選択することを推奨します。
プロセス モデル
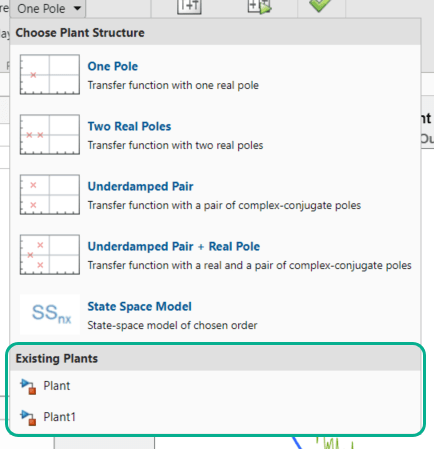
プロセス モデルとは 3 つ以下の極をもつ伝達関数で、零点、遅延および積分器要素を追加することで拡張できます。プロセス モデルは、時定数、ゲインおよびむだ時間を表すモデル パラメーターによってパラメーター化されています。PID 調整器の [プラントの同定] タブにある [構造] メニューで、プロセス モデルを選択します。

選択した構造に対して、オプションで遅延、零点または積分器要素に対応するチェック ボックスを使用してこれらを追加できます。[パラメーターの編集] をクリックすると、これらの選択によって設定されるモデルの伝達関数が表示されます。

利用できる最もシンプルなプロセス モデルは、実数極が 1 つで、零点も遅延要素も存在しない伝達関数です。
このモデルは、パラメーター K (ゲイン) および T1 (最初の時定数) で定義されます。選択できるプロセス モデル構造の中で最も複雑なのは、極が 3 つ、付加的な積分器が 1 つ、零点が 1 つ、むだ時間が 1 つ追加されたものです。次に示す実極と極の複素共役対を 1 つずつもつモデルはその一例です。
このモデルでは、設定可能なパラメーターには極および零点に関連付けられた時定数、T1、Tω および Tz があります。その他のパラメーターは減衰係数 ζ、ゲイン K およびむだ時間 τ です。
プロセス モデル タイプを選択すると、PID 調整器はプラントのパラメーターの初期値を自動的に計算して、推定されるモデルの応答と、測定またはシミュレートされたデータの両方を示すプロットを表示します。パラメーターの値は、プロット上のインジケーターを使用してグラフィカルに編集するか、プラントのパラメーター エディターを使用して数値的に編集できます。このプロセスを示す例は、応答データからプラント パラメーターを対話的に推定を参照してください。
次の表は、利用可能なプロセス モデルのタイプを定義するさまざまなパラメーターをまとめています。
| パラメーター | 次で使用 | 説明 |
|---|---|---|
| K — ゲイン | すべての伝達関数 | 任意の実数を取ることができる。 プロットで、プラント応答曲線 (青) を上下にドラッグして K を調整します。 |
| T1 — 最初の時定数 | 1 つ以上の実極をもつ伝達関数 | 0 から T (測定またはシミュレートされたデータの時間範囲) までの任意の値を取ることができる。 プロットで、赤い x を左 (ゼロに向かって) または右 (T に向かって) ドラッグして T1 を調整します。 |
| T2 — 2 つ目の時定数 | 2 つの実極をもつ伝達関数 | 0 から T (測定またはシミュレートされたデータの時間範囲) までの任意の値を取ることができる。 プロットで、マゼンダの x を左 (ゼロに向かって) または右 (T に向かって) ドラッグして T2 を調整します。 |
| Tω — 固有振動数 ωn に関連付けられる時定数。ここで Tω = 1/ωn | 極の不足減衰ペア (複素共役対) をもつ伝達関数 | 0 から T (測定またはシミュレートされたデータの時間範囲) までの任意の値を取ることができる。 プロットで、オレンジの応答包絡線を左 (ゼロに向かって) または右 (T に向かって) にドラッグして Tω を調整します。 |
| ζ — 減衰係数 | 極の不足減衰ペア (複素共役対) をもつ伝達関数 | 0 と 1 の間の任意の値を取ることができる。 プロットで、オレンジの応答包絡線を左 (ゼロに向かって) または右 (T に向かって) にドラッグして ζ を調整します。 |
| τ — 伝達遅延 | 任意の伝達関数 | 0 から T (測定またはシミュレートされたデータの時間範囲) までの任意の値を取ることができる。 プロット内で、オレンジの垂直バーを左 (ゼロに向かって) または右 (T に向かって) ドラッグして τ を調整します。 |
| Tz — モデルの零点 | 任意の伝達関数 | –T から T (測定またはシミュレートされたデータの時間範囲) までの任意の値を取ることができる。 プロット内で、赤い丸を左 (–T に向かって) または右 (T に向かって) にドラッグして Tz を調整します。 |
| 積分器 | 任意の伝達関数 | 1/s の因子を伝達関数に追加します。これに関連付けられている調整パラメーターはありません。 |
状態空間モデル
同定のための状態空間モデル構造は、状態の数、すなわち "モデル次数" の選択により主に定義されます。状態空間モデル構造は、測定またはシミュレートされた I/O データとの十分な一致を得るために、プロセス モデル構造でサポートされるよりも高い次数のモデルが必要な場合に使用します。状態空間モデル構造では、システムのダイナミクスが次のように状態方程式と出力方程式で表現されます。
x は状態変数のベクトルで、選択されたモデルの次数に基づいてソフトウェアにより自動的に選択されます。u は入力信号、y は出力信号を表します。
状態空間モデル構造を使用するには、[プラントの同定] タブの [構造] メニューから、[状態空間モデル] を選択します。次に [構造の構成] をクリックして [状態空間モデルの構造] ダイアログ ボックスを開きます。
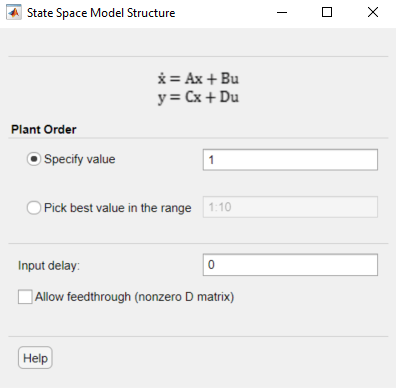
このダイアログ ボックスを使用してモデルの次数、遅延および直達特性を指定します。次数がわからない場合は、[範囲内の最適な値を選択] を選択して次数の範囲を入力します。この場合、[プラントの推定] の [推定] をクリックすると、ハンケル特異値の棒グラフが表示されます。システムのダイナミクスに大きく寄与するハンケル特異値の数字に等しいモデル次数を選択します。
状態空間モデル構造を選択すると、有効な推定モデルが存在する場合にのみ、同定プロットにプラント応答 (青) 曲線が表示されます。たとえば、プロセス モデルを推定した後に構造を変えると、推定したモデルと等価の状態空間モデルが表示されます。モデルの次数を変更すると、プラント応答曲線は新しい推定を実行するまで表示されません。
状態空間モデル構造を使用する場合は、モデルのパラメーターを直接操作することはできません。したがって、同定されたモデルは、モデルの状態変数に物理的な意味がない、構造化されていないモデルとして捉える必要があります。
ただし、モデルの入力遅延および全体のゲインをグラフィカルに調整できます。むだ時間のある状態空間モデルを選択した場合、遅延はプロット上でオレンジ色の垂直バーによって表現されます。このバーを水平方向にドラッグして遅延の値を変えます。モデルのゲインは、プラント応答曲線 (青) を上下にドラッグして調整します。
既存のプラント モデル
以前にインポートまたは同定されたモデルがあれば、[プラント リスト] 領域にリストされます。

これらのプラントのいずれかを使用して、モデル構造を定義し、モデルのパラメーター値を初期化することができます。そうするには、[プラントの同定] タブにある [構造] メニューで線形プラント モデルを選択します。
選択したプラントがプロセス モデル (idproc (System Identification Toolbox) オブジェクト) である場合、PID 調整器は同定されたプラントにその構造を使用します。プラントがその他のモデル タイプである場合、PID 調整器は状態空間モデル構造を使用します。アプリにより、選択したプラントを使用して推定プラントのパラメーターが初期化されます。
モデル構造間での切り替え
あるモデル構造から別のモデル構造に切り替えると、モデルの特性 (極の位置/零点の位置、ゲイン、遅延) はできるだけ保持されます。たとえば、1 極モデルから 2 極モデルに切り替えると、T1、Tz、τ および K の既存の値は保持され、T2 は既定値 (または以前に割り当てられた値があればその値) に初期化されます。
パラメーター値の推定
モデル構造を選択したら、推定されたモデルの応答と測定またはシミュレートされた入力/出力データとの間でよい一致を得るために、いくつかの方法で手動または自動でパラメーター値を調整できます。これらすべての方法を説明する例は次を参照してください。
応答データからプラント パラメーターを対話的に推定 (Control System Toolbox™)
測定またはシミュレーションで得られた応答データから対話的にプラントを推定 (Simulink Control Design) Simulink® Control Design™)
PID 調整器は、モデル構造が選択されている場合はモデル パラメーターのスマートな初期化を実行しません。その代わり、プロットに反映されるモデル パラメーターの初期値は、範囲の値の中央値から任意に選択されます。パラメーター値を手動で調整する前に良い開始点が必要な場合は、[プラントの同定] タブから [初期化して推定] オプションを使用します。
初期条件の処理
場合によっては、システム応答は初期条件に強く影響されます。したがって、観察データを近似するために伝達関数の形式で入力と出力の関係を記述するだけでは不十分です。これは、わずかに減衰するモードを含むシステムに特に当てはまります。PID 調整器では、初期条件応答と入力応答の和が観測された出力に十分一致するように、モデル パラメーターに加えて初期条件も推定できます。[推定オプション] ダイアログ ボックスを使用して、自動推定中に初期条件を処理する方法を指定します。既定では、初期条件の処理 (ゼロ値に固定するか推定するか) は推定アルゴリズムによって自動的に実行されます。しかし、[初期条件] メニューを使用して特定の選択を強制的に適用できます。
初期条件は、自動推定の場合にのみ推定できます。モデル パラメーターとは異なり、手動では変更できません。しかし推定後は、モデル構造の変更または新しい同定データのインポートが行われない限り、推定値に固定されます。
自動推定の実行後にモデル パラメーターを変更すると、モデルの応答では初期条件からの固定の (つまり、モデルのパラメーターとは独立した) 寄与が表示されます。次のプロットでは、初期条件の効果が特に大きいことが特定されています。その後で遅延を調整した場合、入力遅延マーカー (τ アジャスター) の左側の応答部分が純粋に初期条件からのものです。τ アジャスターの右側の部分には入力信号と初期条件の両方の影響が含まれます。
