mmseweights
線形イコライザーの MMSE タップ重み
説明
例
最小平均二乗誤差 (MMSE) の解を計算し、線形イコライザーのタップ重みにその重みを使用します。
シミュレーション変数を初期化します。
M = 4; % QPSK
numSymbols = 10000;
numTrainingSymbols = 1000;
chtaps = [1 0.5*exp(1i*pi/6) 0.1*exp(-1i*pi/8)];
SNR = 20;QPSK 変調されたシンボルを生成します。シンボルに遅延したマルチパス チャネルのフィルター処理と AWGN 障害を適用します。
data = randi([0 M-1],numSymbols,1);
tx = pskmod(data,M,pi/4);
rx = awgn(filter(chtaps,1,tx),25,'measured');CMA アルゴリズムを使用してタップ重みを入力するように構成された線形イコライザー System object を作成します。MMSE 重みを計算します。初期タップ重みを計算された MMSE 重みに設定します。劣化したシンボルをイコライズします。
eq = comm.LinearEqualizer(Algorithm='CMA', ... AdaptWeights=false,InitialWeightsSource='Property')
eq =
comm.LinearEqualizer with properties:
Algorithm: 'CMA'
NumTaps: 5
StepSize: 0.0100
Constellation: [0.7071 + 0.7071i -0.7071 + 0.7071i -0.7071 - 0.7071i 0.7071 - 0.7071i]
InputSamplesPerSymbol: 1
AdaptWeightsSource: 'Property'
AdaptWeights: false
InitialWeightsSource: 'Property'
InitialWeights: [5×1 double]
WeightUpdatePeriod: 1
wgts = mmseweights(eq,chtaps,SNR)
wgts = 5×1 complex
0.0005 - 0.0068i
0.0103 + 0.0117i
0.9694 - 0.0019i
-0.3987 + 0.2186i
0.0389 - 0.1756i
eq.InitialWeights = wgts; [y,err,weights] = eq(rx);
劣化したシンボルとイコライズされたシンボルのコンスタレーションをプロットします。
constell = comm.ConstellationDiagram(NumInputPorts=2); constell(rx,y)

イコライザーの誤差信号をプロットし、イコライズされたシンボルのエラー ベクトル振幅を計算します。
plot(abs(err)) grid on; xlabel('Symbols'); ylabel('|e|')
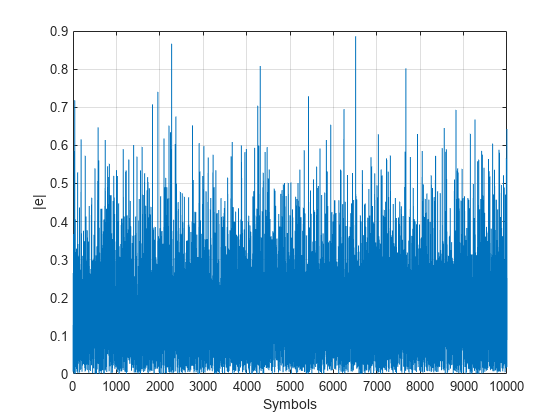
errevm = comm.EVM; evm = errevm(tx,y)
evm = 139.0863
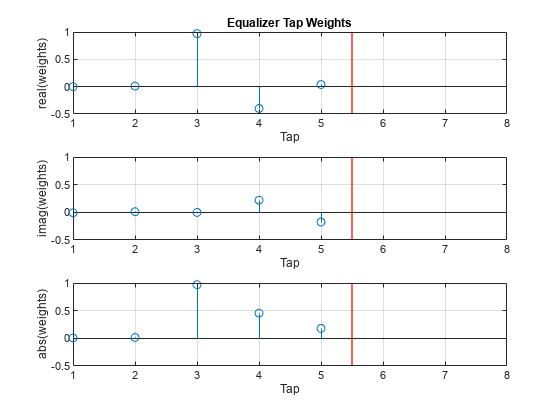
イコライザーのタップ重みをプロットします。
subplot(3,1,1); stem(real(weights)); ylabel('real(weights)'); xlabel('Tap'); grid on; axis([1 8 -0.5 1]) line([eq.NumTaps+0.5 eq.NumTaps+0.5],[-0.5 1], ... Color='r',LineWidth=1) title('Equalizer Tap Weights') subplot(3,1,2); stem(imag(weights)); ylabel('imag(weights)'); xlabel('Tap'); grid on; axis([1 8 -0.5 1]) line([eq.NumTaps+0.5 eq.NumTaps+0.5],[-0.5 1], ... Color='r',LineWidth=1) subplot(3,1,3); stem(abs(weights)); ylabel('abs(weights)'); xlabel('Tap'); grid on; axis([1 8 -0.5 1]) line([eq.NumTaps+0.5 eq.NumTaps+0.5],[-0.5 1], ... Color='r',LineWidth=1)
入力引数
出力引数
バージョン履歴
R2019a で導入