AUTOSAR とは
AUTOSAR (AUTomotive Open System ARchitecture) は、自動車メーカー、サプライヤー、およびその他のエレクトロニクス、半導体、ソフトウェア業界の企業による世界規模の開発パートナーシップです。AUTOSAR 規格は、ソフトウェアの標準化、再利用、相互運用性を目的に設計されています。
AUTOSAR 規格は、現在と将来世代の車載電子コントロール ユニット (ECU) をサポートする 2 つのプラットフォームを提供しています。
AUTOSAR Classic Platform — このプラットフォームは、パワートレイン、シャシー、ボディ、インテリアのエレクトロニクスなど、従来の内部アプリケーションをサポートします。
AUTOSAR Adaptive Platform — このプラットフォームは、自動運転、Car-to-X、無線 (OTA) でのソフトウェア更新、モノのインターネット (IoT) の一部としての車両の使用など、サービスベースのアプリケーションをサポートします。
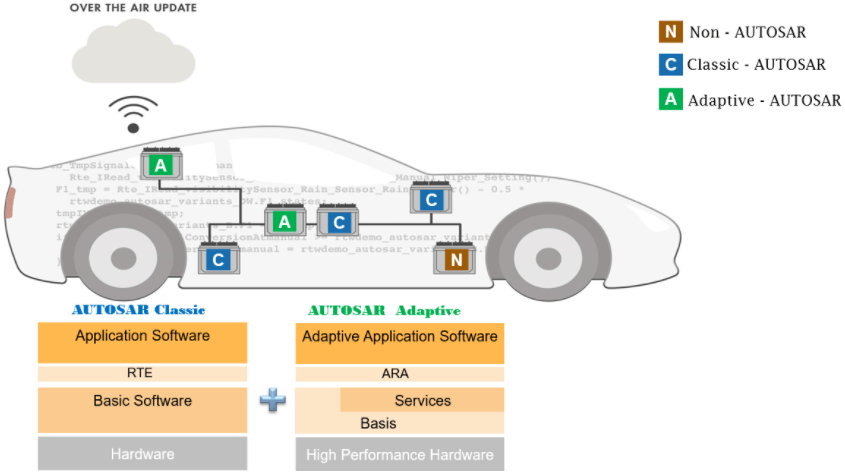
AUTOSAR Classic、AUTOSAR Adaptive、および AUTOSAR 以外の ECU を 1 台の車で相互運用できます。
AUTOSAR 規格の概要については、AUTOSAR 規格を参照してください。
AUTOSAR プラットフォーム
AUTOSAR はソフトウェア アーキテクチャに基づいており、2 つのプラットフォームに分類されます。AUTOSAR Classic Platform と AUTOSAR Adaptive Platform です。AUTOSAR Classic Platform は、ハード リアルタイムと安全性の制約がある組み込みシステム向けのソリューションです。AUTOSAR Adaptive Platform は、自動運転などのフェイルオペレーショナル システムを構築するための高性能コンピューティング ECU 向けのソリューションです。
AUTOSAR Classic Platform アーキテクチャには 3 つの層があります。
アプリケーション ソフトウェア — ソフトウェア コンポーネントと呼ばれる自己完結ユニットであり、アプリケーションの実装を提供。ソフトウェア コンポーネントをビルドすると、プラットフォームに準拠した AUTOSAR XML 記述と C コード実装モジュールが生成されます。
ランタイム環境 (RTE) — アプリケーション ソフトウェアと基本ソフトウェアの間の通信を提供。ソフトウェア コンポーネントは RTE 経由で排他的に他のコンポーネントや基本ソフトウェア モジュールと通信します。これにより、ソフトウェア コンポーネントを特定の ECU や他のソフトウェア コンポーネントから独立させることができます。
基本ソフトウェア (BSW) — ECU の抽象化、マイクロコントローラーの抽象化、およびメモリや診断などのサービスを提供。
AUTOSAR Adaptive Platforom アーキテクチャには、AUTOSAR Classic Platform と同様の層がありますが、こちらは非常に計算量の多いアプリケーションの処理基盤を提供するサービス指向アーキテクチャ (SOA) です。Adaptive Platform は POSIX オペレーティング システムをサポートしています。
AUTOSAR プラットフォームの詳細については、AUTOSAR Classic Platform と Adaptive Platform との比較を参照してください。
Simulink での AUTOSAR システムの開発
Simulink® は、AUTOSAR 規格をネイティブにサポートしています。Simulink で AUTOSAR ソフトウェアを開発するには、次のようにします。
Simulink と AUTOSAR Blockset を使用して、Classic AUTOSAR システムおよび AUTOSAR Classic および Adaptive システムを設計およびシミュレーション。
オプションで、System Composer™ を使用して、AUTOSAR ソフトウェア コンポジションとコンポーネントの階層を作成。
Embedded Coder® を使用して、テストおよび AUTOSAR RTE との統合用に ARXML 記述と C または C++ の量産アルゴリズム コードを生成。
以下に示すように、Simulink、AUTOSAR Blockset、および Embedded Coder は、AUTOSAR アーキテクチャとのラウンドトリップ統合をサポートしています。

AUTOSAR オーサリング ツールまたは Simulink を使用して、ARXML ファイルを作成およびエクスポートできます。この ARXML ファイルは、AUTOSAR SWC の開発に使用されます。
次に SWC を Simulink にインポートして、モデルを生成するか、既存のモデルを更新します。この時点で、C コードを生成し、モデルの SIL/PIL テストを実行できます。
変更を加えた場合は、すべての変更を含む更新された ARXML ファイルをエクスポートできます。これらのファイルは、SWC や将来の ARXML バージョンを Simulink や他の AUTOSAR オーサリング ツールで更新するために使用できます。
AUTOSAR Blockset は、ISO 26262 規格での使用条件を満たしています。オプションで、生成する AUTOSAR コードを ISO 26262 に準拠させるために、IEC Certification Kit を使用します。準拠の詳細については、Highway Lane Following: A Model-Based Design Example for ISO 26262:2018 (IEC Certification Kit)の例を参照してください。