実行時キャリブレーションと測定用の AUTOSAR Adaptive データの設定
AUTOSAR Blockset を使用すると、XCP サーバー通信と ASAP2 (A2L) ファイル生成に基づく、Adaptive アプリケーション データの実行時キャリブレーションを構成できます。XCP と ASAP2 の機能は Adaptive Platform (AP) 仕様の範囲外で定義され、Release 19-11 時点でデータのキャリブレーションに対応していません。
Adaptive コードの生成と展開の一環として、生成された C++ コードでの XCP サーバー通信のインターフェイスを設定し、キャリブレーションと測定のためのモデル データを含む A2L ファイルをエクスポートできます。
Adaptive コードを展開する前に、以下を実行できます。
[コンフィギュレーション パラメーター] ダイアログ ボックスで、XCP サーバーの関数呼び出しを Adaptive C++ コードで生成し、ASAP2 (A2L) ファイルで XCP セクションを生成するようにモデルを構成します。
モデルの [AUTOSAR] タブの [共有] ギャラリーにある [キャリブレーション ファイルの生成] を使用して、キャリブレーションおよび測定のためのモデル データを含む ASAP2 (A2L) ファイルを生成します。
生成されたコードでの XCP 通信インターフェイスの設定
通信機能を有効にするには、AUTOSAR Adaptive モデル コンフィギュレーション パラメーター [トランスポート層] (Embedded Coder) を使用して、XCP トランスポート層を選択します。[トランスポート層] を [None] 以外の値に設定すると、Simulink® は XCP サーバー関数呼び出しを生成された C++ コードに追加します。既定では、ツールで MathWorks® XCP サーバー スタックが使用されます。
XCP トランスポート層を選択すると、その他の XCP パラメーターが有効になります。次のイメージは、XCP サーバーのモデル コンフィギュレーション パラメーターを示しています。

モデル コンフィギュレーション パラメーターを使用すると、以下が可能になります。
通信に使用するトランスポート層を指定します。
ターゲット マシンの IP アドレスとポート番号を指定します。そのポートを使用できるのは 1 つのアプリケーションに対してのみです。
オプションで、XCP サーバーの詳細メッセージを有効にします。
オプションで、MathWorks XCP サーバーの代わりに、イーサネット トランスポート層に基づいてカスタム XCP サーバー実装を使用できます。カスタム XCP サーバーを使用するには、カスタム XCP サーバー API コマンドを使用して、XCP サーバーのヘッダー ファイルで宣言された関数の実装を提供します。XCP サーバーのヘッダー ファイルは MATLAB® インストール フォルダー
matlabroot/toolbox/coder/autosar/adaptive_deployment/includeコンフィギュレーション パラメーター [ツールチェーンの詳細] でカスタムの XCP サーバーの詳細を追加するか、詳細を
CMakeLists.txtファイルに手動で追加します。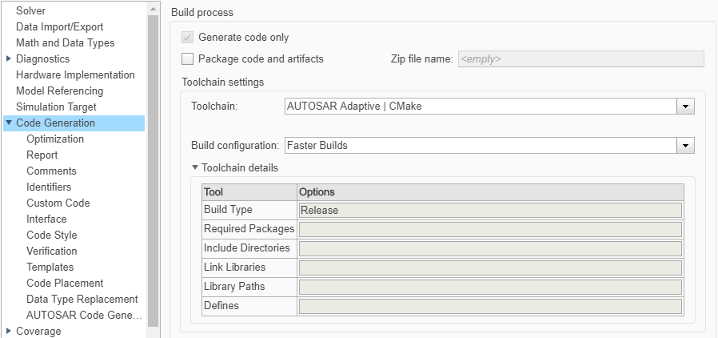
ASAP2 (A2L) ファイルを生成するには、モデルの [AUTOSAR] タブの [共有] ギャラリーにある [キャリブレーション ファイルの生成] を使用します。詳細については、ASAP2 ファイルおよび CDF キャリブレーション ファイルの生成 (Simulink Coder)を参照してください。
参考
coder.asap2.export (Simulink Coder) | トランスポート層 (Embedded Coder)