このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
CubeSatのモデル化とシミュレーション
モデルを作成するには、CubeSat Vehicle ブロック、モデル テンプレート、およびプロジェクトを使用します。複数の宇宙機をモデル化する宇宙機の例を調べます。CubeSat Vehicle ブロックは一度に 1 つの衛星を伝播します。複数の衛星を同時に伝播するには、Orbit Propagator ブロックを使用します。最短の四元数回転を計算するには、Attitude Profile ブロックを使用します。
宇宙機のモデリングとシミュレーションを開始できるように、Aerospace Blockset™ は Simulink® スタート ページでプロジェクトとモデルを提供しています。

CubeSat 車両モデル テンプレート — CubeSat Vehicle ブロックを使用して CubeSat の軌道を伝播および視覚化する方法を示すモデル テンプレート (
CubeSat Simulation Project)。Spherical Harmonic Gravity Model ブロックは、軌道伝播の重力ポテンシャル源として使用されます。CubeSat Vehicle ブロックに設定された事前設定された指向モードが姿勢を制御します。CubeSat シミュレーション プロジェクト — 提供されたフレームワークに詳細な車両コンポーネントを追加して、Simulink で詳細な CubeSat システム設計を作成する方法を示す、すぐにシミュレーションできるプロジェクト (
CubeSat Simulation Project)。CubeSat モデルベース システム エンジニアリング プロジェクト — 低地球軌道 (LEO) の 1U CubeSat の宇宙ミッション アーキテクチャを Simulink と System Composer™、Aerospace Blockset を使用してモデル化する方法を示す、すぐにシミュレーション可能なプロジェクト (
CubeSat Model-based System Engineering Project)。
CubeSat 車両モデル テンプレート
テンプレート モデルは、Simulink 3D Animation™ を使用して視覚化された CubeSat Vehicle ブロックを含む、すぐにシミュレーションできる例です。
CubeSat Vehicle Model ブロックの代わりに Vehicle Model ブロックを使用する方法を示すプロジェクトについては、CubeSatシミュレーションプロジェクト を参照してください。
CubeSat 車両モデル テンプレート を起動します。
Create Modelをクリックします。

CubeSat Vehicle ブロックは、そのまま使用できる単純な CubeSat 車両をモデル化します。CubeSat Vehicle ブロックは、初期軌道状態をケプラー軌道要素のセットとして使用するように構成されています。
このモデルは、Spherical Harmonic Gravity Model ブロックを使用して、CubeSat の車両重力を提供します。
CubeSat に慣れるには、CubeSat Vehicle ブロック設定を試してみてください。
ブロックの CubeSat Orbit タブでは、オプションで Input method パラメータを使用して、初期軌道状態を次のセットとして変更できます。
地球中心の慣性軸における位置と速度の状態ベクトル
地球中心の地球固定軸における位置と速度の状態ベクトル
NED フレームで表現された、ECEF に対する物体の緯度、経度、高度、速度
CubeSat Attitude タブでは、CubeSat の姿勢制御を定義するための位置合わせベクトルと制約ベクトルを指定できます。
CubeSat 車両は、まずプライマリ位置合わせベクトルをプライマリ制約ベクトルに位置合わせします。次に、CubeSat 車両は、プライマリ アライメントに影響を与えずに、セカンダリ アライメント ベクトルをセカンダリ制約ベクトルにできるだけ近づけるようにします。
CubeSat 高度タブでは、事前設定された地球 (天底) 地球指向 (デフォルト) と太陽追跡姿勢制御モードを選択することもできます。
Earth Orientation Parameters タブでは、ECI 座標系と ECEF 座標系間の変換に高次の地球方向パラメータを含めるようにブロックに指示できます。
モデルを実行してシミュレートします。
CubeSat からの出力信号を表示するには、スコープ サブシステムをダブルクリックし、複数のスコープを開きます。
有効な Simulink 3D Animation ライセンスをお持ちの場合は、CubeSat Orbit Animation ウィンドウで軌道を視覚化することもできます。
軌道伝播モデルのコピーを保存します。このモデルは、ミッション分析ライブ スクリプトに使用できます。
CubeSat 車両モデル テンプレート CubeSat Vehicle ブロックは、事前に設定されたシンプルな軌道および姿勢制御モードを使用します。独自の詳細なコンポーネントを使用して CubeSat 車両をモデル化およびシミュレートするには、Simulink スタート ページの CubeSat シミュレーション プロジェクトを検討してください。詳細については、CubeSatシミュレーションプロジェクトを参照してください。
CubeSatシミュレーションプロジェクト
このプロジェクトは、Simulink 3D Animation を使用して視覚化した、すぐにシミュレーションできる例です。この例では、CubeSat Vehicle ブロックの代わりに Vehicle Model サブシステムを使用します。
System Composer を使用して宇宙ミッション アーキテクチャもモデル化するモデルについては、CubeSatモデルベースシステムエンジニアリングプロジェクト を参照してください。
CubeSat シミュレーション プロジェクト を開始します。
Create Project をクリックして指示に従ってください。

Vehicle Model サブシステムは、そのまま使用できる CubeSat 車両をモデル化します。
独自のより洗練された衛星モデルを作成するには、Vehicle Model フレームワークを試してください。たとえば、アクチュエータ サブシステムにデフォルトで含まれている完璧なスラスタ モデルを、独自のより現実的なスラスタ モデルまたはリアクション ホイール モデルに置き換えることができます。
CubeSat の軌道と姿勢を変更するには、ミッション構成セクションで、Edit Initial Orbit and Attitude ブロックをダブルクリックします。これらのパラメータは、CubeSat Vehicle ブロックの対応するパラメータと同じ目的を持ちます。
モデルを実行してシミュレートします。
CubeSat からの出力信号を表示するには、スコープ サブシステムをダブルクリックし、複数のスコープを開きます。
Simulink 3D Animation のライセンスをお持ちの場合は、アニメーション ウィンドウで軌道を視覚化することもできます。Visualization サブシステムをダブルクリックし、Open Simulink 3D Animation window ボタンをクリックします。
CubeSat Orbit Animation ウィンドウが開きます。

CubeSatモデルベースシステムエンジニアリングプロジェクト
CubeSat モデルベース システム エンジニアリング (MBSE) プロジェクトは、System Composer と Aerospace Blockset を使用して宇宙ミッション アーキテクチャをモデル化する方法を示すシミュレーション対応の例です。このプロジェクトでは、サブシステム モデルを再利用するために CubeSatシミュレーションプロジェクト を参照し、次に System Composer アーキテクチャ レイヤーを追加し、システム要件をアーキテクチャ内のコンポーネントにリンクし、Simulink Test™ を使用して最上位レベルのミッション要件を検証します。このプロジェクトでは、Simulink 3D Animation、Aerospace Toolbox 衛星シナリオ、および Mapping Toolbox™ を使用して結果を視覚化します。
CubeSat モデルベース システム エンジニアリング プロジェクト を開き、Create Project をクリックして、指示に従います。
MATLAB® コマンド ウィンドウの Projects Shortcut タブから、MBSE Template Overview をクリックします。
テンプレートの概要では、プロジェクトと宇宙ミッション アーキテクチャをモデル化する方法について説明します。
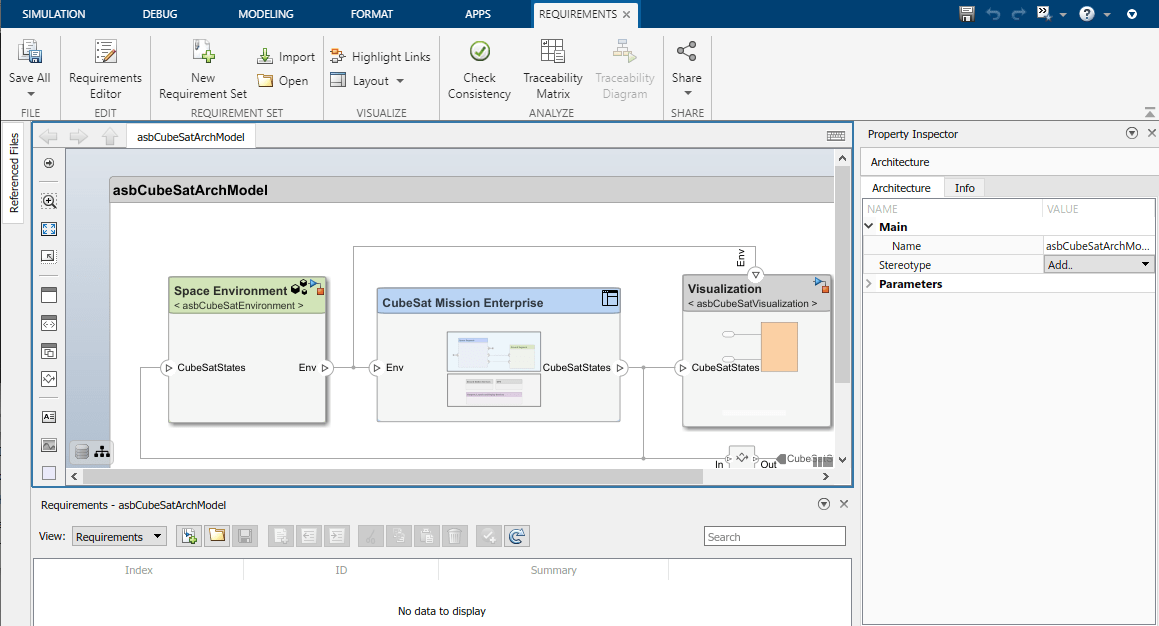
概要を使用して、
asbCubeSatArchModelアーキテクチャを調べ、System Composer を使用してアーキテクチャを拡張する方法を学習します。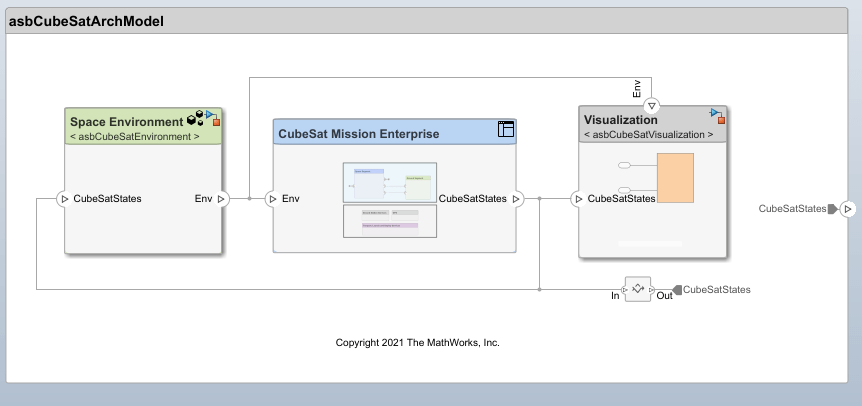
このプロジェクトは、System Composer 内のアーキテクチャを定義するのに役立ちます。この例のアーキテクチャは、国際システム工学評議会 (INCOSE) の宇宙システム作業グループ (SSWG) によって開発された CubeSat リファレンス モデル (CRM) に基づいています。
コンポーネントの基礎となる部分を表示するには、コンポーネントをダブルクリックします。たとえば、ミッションのアーキテクチャ モデルを表示するには、
CubeSat Mission Enterpriseをダブルクリックします。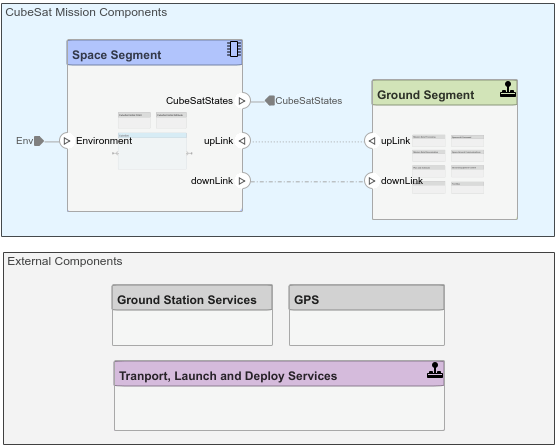
このモデルは、ミッション エンタープライズをモデル化する System Composer コンポーネントで構成されています。
MBSE Template Overview を使用してプロジェクトをナビゲートし、System Composer 要素を使用して宇宙ミッション アーキテクチャをモデル化する方法を学びます。
System Composer と共に:
ステレオタイプを使用して要素にドメイン固有のメタデータを追加することで、アーキテクチャ要素を拡張します。コンポーネント、コネクタ、ポート、その他のアーキテクチャ要素にステレオタイプを適用して、これらの要素に共通のプロパティ セットを提供します。プロファイルに新しいステレオタイプを表示、編集、または追加するには、[Modeling] タブで [Profile Editor] をクリックし、ステレオタイプ プロファイルを選択します。この例では、
CubeSatProfile.xmlプロファイルを開きます。
プロファイルを変更したり、新しいプロファイルを追加したり、新しいプロファイルをコンポーネントに適用したりできます。
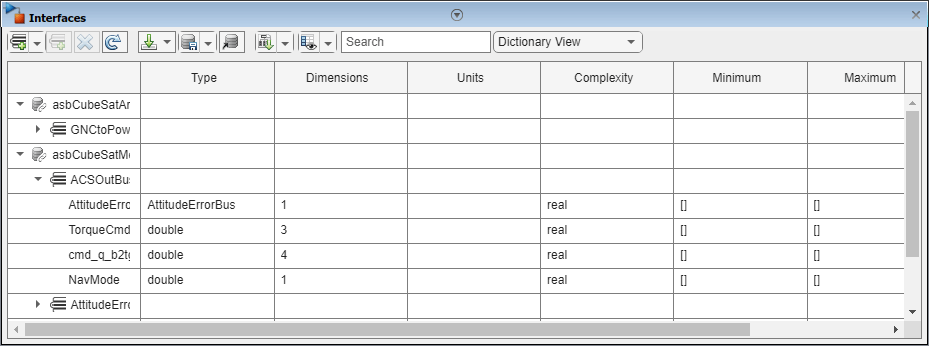
インターフェースを使用してポートを流れる情報の種類を定義します。ポートに新しいインターフェースを表示、編集、または追加するには、[Modeling] タブで [Interface Editor] をクリックし、インターフェースを選択します。たとえば、asbCubeSatModelData.sldd 、 ACSOutBus を選択します。
Views 、 Architecture Views をクリックし、ビュー (例: CubeSat MBSE Demo) を選択して、アーキテクチャ ビューでシステムを視覚化します。

トレーサビリティを確立するには、機能要件をコンポーネントに割り当ててシステム要件をリンクします。モデルの Apps タブで、 Requirements Manager を選択します。
アーキテクチャを設計モデルに接続したり、アーキテクチャをシミュレートしたりするなど、このプロジェクトでの作業の詳細については、MBSE Template Overview を参照してください。
最上位レベルのミッション要件を検証するには、Simulink Test を使用します。
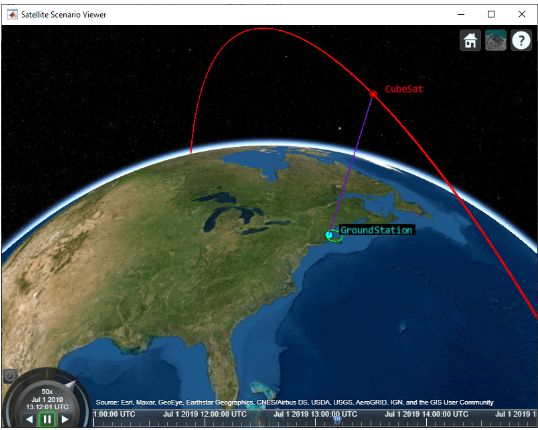
衛星シナリオ ツールを使用して CubeSat のミッション分析を実行する方法を理解するには、MATLAB コマンド ウィンドウの Projects Shortcut タブから Analyze with Satellite Scenario をクリックします。
ユーティリティ関数
Aerospace Toolbox は座標変換のためのユーティリティ関数を提供します。これらの関数を使用して、CubeSat Vehicle ブロックのさまざまな初期条件モード間を移動できます。
| Action | 関数 |
|---|---|
地球中心の慣性平均赤道平均春分点における位置と速度ベクトルを計算する | |
地心地球固定(ECEF)座標系で位置、速度、加速度ベクトルを計算します。 | |
グリニッジ平均時と見かけの恒星時を計算する | |
地心赤道位置と速度ベクトルを使用してケプラーの軌道要素を計算する | |
ケプラーの軌道要素を使用して地心赤道座標系で位置と速度ベクトルを計算する |
参照
[1] Vallado, D. A. Fundamentals of Astrodynamics and Applications. New York: McGraw-Hill, 1997.
参考
Attitude Profile | CubeSat Vehicle | Orbit Propagator | ecef2eci | eci2ecef | ijk2keplerian | keplerian2ijk | siderealTime