結果:
- NKTg₁ = x·p (Position–Momentum interaction)
- NKTg₂ = (dm/dt)·p (Mass-variation–Momentum interaction)
- From NKTg₁: [M⋅L2/T][M·L²/T][M⋅L2/T]
- From NKTg₂: [M2⋅L/T2][M²·L/T²][M2⋅L/T2]
- Position (x): 4.498×1094.498 \times 10^94.498×109 km
- Velocity (v): 5.43 km/s
- Mass (m): 1.0243×10261.0243 \times 10^{26}1.0243×1026 kg
- Momentum (p = m·v): 5.564×10265.564 \times 10^{26}5.564×1026 kg·m/s
- NKTg₁ = x·p ≈ 2.503 × 10³⁶ NKTm
- NKTg₂ ≈ -1.113 × 10²² NKTm (assumed micro gas escape)
- Total NKTg ≈ 2.501 × 10³⁶ NKTm
- Astronomy: describe planetary mass variation, star/galaxy formation, and long-term orbital stability.
- Aerospace: optimize rocket fuel usage, account for mass leakage, design ion/plasma engines.
- Earth sciences: analyze GRACE-FO data, model ice melting, sea-level rise, and mass redistribution.
- Engineering: variable-mass robotics, cargo systems, vibration analysis, fluid/particle simulations.
- Establishes a new fundamental unit (NKTm), independent of Newton and Joule.
- Provides a theoretical framework for variable-mass dynamics, beyond Newton and Einstein.
- Supports accurate computation and simulation of real-world systems with mass variation.
- Which one is your favorite?
- Which ones do you want to add to your collection?
The functionality would allow report generation straight from live scripts that could be shared without exposing the code. This could be useful for cases where the recipient of the report only cares about the results and not the code details, or when the methodology is part of a company know how, e.g. Engineering services companies.
In order for it to be practical for use it would also require that variable values could be inserted into the text blocks, e.g. #var_name# would insert the value of the variable "var_name" and possibly selecting which code blocks to be hidden.
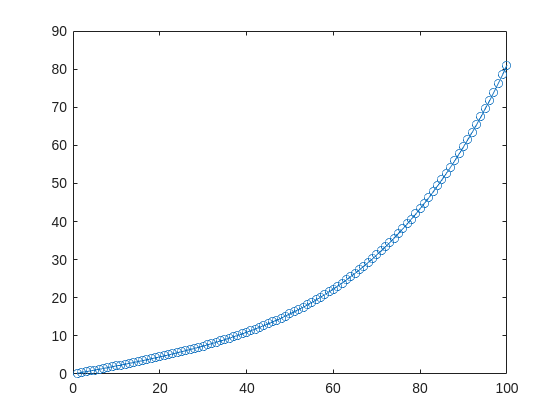
- Using the traditional lsqcurvefit-wrapped "Levenberg–Marquardt" algorithm:
- Using the deep-learning-wrapped "Levenberg–Marquardt" algorithm:

trainingOptions - Options for training deep learning neural network - MATLAB
This MATLAB function returns training options for the optimizer specified by solverName.
- It's the question that drives us, Neo. It's the question that brought you here. You know the question, just as I did.
- What is the Matlab?
- Unfortunately, no one can be told what the Matlab is. You have to see it for yourself.
- The Matlab is everywhere. It is all around us. Even now, in this very room. You can feel it when you go to work [...]
- The first Matlab I designed was quite naturally perfect. It was a work of art. Flawless. Sublime.
- Kasuo Hardware Setup
- Select a Kasuo sensor (e.g., temperature, microphone, or motion sensor).
- Connect it to a DAQ or microcontroller board for data collection.
- Data Acquisition in MATLAB
- Use MATLAB’s Data Acquisition Toolbox to stream sensor data directly.
- Example snippet:
- Signal Processing with Simulink
- Build a Simulink model to filter noise, detect anomalies, or design control logic.
- Simulink enables real-time visualization and iterative tuning.
- Validation & Protection Simulation
- Add Kasuo’s circuit protection components (e.g., TVS diodes, surge suppressors) in the physical design.
- Use Simulink to simulate stress conditions, validating system robustness before hardware testing.
- Faster prototyping with MATLAB & Simulink.
- Greater reliability by incorporating Kasuo protection devices.
- Seamless transition from model to hardware implementation.
- have hooks in your source control system to zip/unzip a mlapp. However, The Mathworks have informed users not to rely on this as the mlapp format may change.
- do all your source control in MATLAB. This is non standard behaviour. Source code and source control should be independent of each other. Web front-ends to source control systems, 3rd party source control apps, CI/CD systems and much more are extremely limited in what they can do with mlapps.
Web サイトの選択
Web サイトを選択すると、翻訳されたコンテンツにアクセスし、地域のイベントやサービスを確認できます。現在の位置情報に基づき、次のサイトの選択を推奨します: United States
また、以下のリストから Web サイトを選択することもできます。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)