このページは機械翻訳を使用して翻訳されました。最新版の英語を参照するには、ここをクリックします。
MATLAB での CAN 通信入門
この例では、CAN チャネルを使用して CAN メッセージを送受信する方法を説明します。ループバック構成で接続されている MathWorks® バーチャル CAN チャネルを使用します。
受信チャネルを作成する
ベンダー名、デバイス名、デバイス チャネル インデックスを指定して、canChannel を使用して CAN チャネルを作成し、メッセージを受信します。
rxCh = canChannel("MathWorks", "Virtual 1", 2);
チャネルを検査する
すべてのチャネル プロパティとその現在の値に関する詳細情報を取得するには、get コマンドを使用します。
get(rxCh)
ArbitrationBusSpeed: []
DataBusSpeed: []
ReceiveErrorCount: 0
TransmitErrorCount: 0
InitializationAccess: 1
InitialTimestamp: [0×0 datetime]
SilentMode: 0
TransceiverState: 'N/A'
BusSpeed: 500000
NumOfSamples: []
SJW: []
TSEG1: []
TSEG2: []
BusStatus: 'N/A'
TransceiverName: 'N/A'
Database: []
MessageReceivedFcn: []
MessageReceivedFcnCount: 1
UserData: []
FilterHistory: 'Standard ID Filter: Allow All | Extended ID Filter: Allow All'
MessagesReceived: 0
MessagesTransmitted: 0
Running: 0
Device: 'Virtual 1'
DeviceChannelIndex: 2
DeviceSerialNumber: 0
DeviceVendor: 'MathWorks'
ProtocolMode: 'CAN'
MessagesAvailable: 0
チャネルの開始
チャネルをオンラインに設定するには、start コマンドを使用します。
start(rxCh);
メッセージを送信する
サンプル関数 generateMsgs は、canMessage を使用して CAN メッセージを作成し、transmit を使用してさまざまな周期で送信します。デモ用に CAN バス上にトラフィックを生成します。
type generateMsgsfunction generateMsgs()
% generateMsgs Creates and transmits CAN messages for demo purposes.
%
% generateMsgs periodically transmits multiple CAN messages at various
% periodic rates with changing message data.
%
% Copyright 2008-2016 The MathWorks, Inc.
% Create the messages to send using the canMessage function. The
% identifier, an indication of standard or extended type, and the data
% length is given for each message.
msgTx100 = canMessage(100, false, 0);
msgTx200 = canMessage(200, false, 2);
msgTx400 = canMessage(400, false, 4);
msgTx600 = canMessage(600, false, 6);
msgTx800 = canMessage(800, false, 8);
% Create a CAN channel on which to transmit.
txCh = canChannel('MathWorks', 'Virtual 1', 1);
% Register each message on the channel at a specified periodic rate.
transmitPeriodic(txCh, msgTx100, 'On', 0.500);
transmitPeriodic(txCh, msgTx200, 'On', 0.250);
transmitPeriodic(txCh, msgTx400, 'On', 0.125);
transmitPeriodic(txCh, msgTx600, 'On', 0.050);
transmitPeriodic(txCh, msgTx800, 'On', 0.025);
% Start the CAN channel.
start(txCh);
% Run for several seconds incrementing the message data regularly.
for ii = 1:50
% Increment the message data bytes.
msgTx200.Data = msgTx200.Data + 1;
msgTx400.Data = msgTx400.Data + 1;
msgTx600.Data = msgTx600.Data + 1;
msgTx800.Data = msgTx800.Data + 1;
% Wait for a time period.
pause(0.100);
end
% Stop the CAN channel.
stop(txCh);
end
例のメッセージを送信するには、generateMsgs 関数を実行します。
generateMsgs();
メッセージの受信
generateMsgs が完了したら、receive 関数を使用してチャネルから利用可能なすべてのメッセージを受信します。
rxMsg = receive(rxCh, Inf, "OutputFormat", "timetable");
head を使用して、受信したメッセージの最初の数行を抽出し、プレビューします。
head(rxMsg)
Time ID Extended Name Data Length Signals Error Remote
___________ ___ ________ __________ ___________________ ______ ____________ _____ ______
0.31722 sec 100 false {0×0 char} {1×0 uint8 } 0 {0×0 struct} false false
0.31723 sec 200 false {0×0 char} {[ 0 0]} 2 {0×0 struct} false false
0.31723 sec 400 false {0×0 char} {[ 0 0 0 0]} 4 {0×0 struct} false false
0.31723 sec 600 false {0×0 char} {[ 0 0 0 0 0 0]} 6 {0×0 struct} false false
0.31723 sec 800 false {0×0 char} {[0 0 0 0 0 0 0 0]} 8 {0×0 struct} false false
0.34689 sec 800 false {0×0 char} {[1 1 1 1 1 1 1 1]} 8 {0×0 struct} false false
0.37728 sec 600 false {0×0 char} {[ 1 1 1 1 1 1]} 6 {0×0 struct} false false
0.37729 sec 800 false {0×0 char} {[1 1 1 1 1 1 1 1]} 8 {0×0 struct} false false
チャネルの停止
チャネルをオフラインに設定するには、stop コマンドを使用します。
stop(rxCh);
受信メッセージを解析する
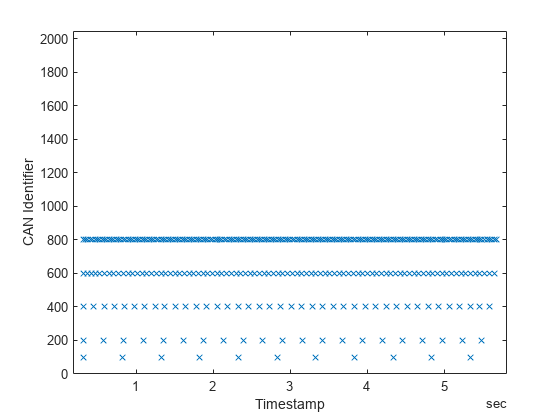
MATLAB ® は、CAN メッセージの解析を実行するための強力な環境を提供します。plot コマンドは、メッセージのタイムスタンプと識別子を含む散布図を作成し、ネットワーク上で特定のメッセージがいつ発生したかの概要を提供できます。
plot(rxMsg.Time, rxMsg.ID, "x") ylim([0 2047]) xlabel("Timestamp") ylabel("CAN Identifier")