車両検出のための YOLO v2 ネットワークの学習
車両検出用の学習データをワークスペースに読み込みます。
data = load("vehicleTrainingData.mat");
trainingData = data.vehicleTrainingData;学習サンプルが保存されているディレクトリを指定します。ファイル名の絶対パスを学習データに追加します。
dataDir = fullfile(toolboxdir("vision"),"visiondata"); trainingData.imageFilename = fullfile(dataDir,trainingData.imageFilename);
学習のためにデータをランダムにシャッフルします。
rng(0) shuffledIdx = randperm(height(trainingData)); trainingData = trainingData(shuffledIdx,:);
table のファイルを使用して imageDatastore を作成します。
imds = imageDatastore(trainingData.imageFilename);
table のラベル列を使用して boxLabelDatastore を作成します。
blds = boxLabelDatastore(trainingData(:,2:end));
データストアを統合します。
ds = combine(imds,blds);
table のラベル列を使用してクラス名を指定します。
classes = trainingData.Properties.VariableNames(2:end);
アンカー ボックスを指定します。
anchorBoxes = [8 8; 32 48; 40 24; 72 48];
事前に初期化された YOLO v2 オブジェクト検出ネットワークを読み込みます。
load("yolov2VehicleDetectorNet.mat","net");
YOLO v2 オブジェクト検出ネットワークを作成します。
detector = yolov2ObjectDetector(net,classes,anchorBoxes)
detector =
yolov2ObjectDetector with properties:
Network: [1×1 dlnetwork]
InputSize: [128 128 3]
TrainingImageSize: [128 128]
AnchorBoxes: [4×2 double]
ClassNames: vehicle
ReorganizeLayerSource: ''
LossFactors: [5 1 1 1]
ModelName: ''
ネットワーク学習オプションを構成します。
options = trainingOptions("sgdm", ... InitialLearnRate=0.001, ... Verbose=true, ... MiniBatchSize=16, ... MaxEpochs=30, ... Shuffle="never", ... VerboseFrequency=30, ... CheckpointPath=tempdir);
YOLO v2 ネットワークに学習させます。
[trainedDetector,info] = trainYOLOv2ObjectDetector(ds,detector,options);
************************************************************************* Training a YOLO v2 Object Detector for the following object classes: * vehicle Training on single CPU. |========================================================================================| | Epoch | Iteration | Time Elapsed | Mini-batch | Mini-batch | Base Learning | | | | (hh:mm:ss) | RMSE | Loss | Rate | |========================================================================================| | 1 | 1 | 00:00:01 | 7.13 | 50.8 | 0.0010 | | 2 | 30 | 00:00:17 | 1.32 | 1.8 | 0.0010 | | 4 | 60 | 00:00:32 | 0.93 | 0.9 | 0.0010 | | 5 | 90 | 00:00:47 | 0.64 | 0.4 | 0.0010 | | 7 | 120 | 00:01:03 | 0.58 | 0.3 | 0.0010 | | 9 | 150 | 00:01:23 | 0.64 | 0.4 | 0.0010 | | 10 | 180 | 00:01:39 | 0.46 | 0.2 | 0.0010 | | 12 | 210 | 00:01:53 | 0.40 | 0.2 | 0.0010 | | 14 | 240 | 00:02:08 | 0.58 | 0.3 | 0.0010 | | 15 | 270 | 00:02:25 | 0.40 | 0.2 | 0.0010 | | 17 | 300 | 00:02:42 | 0.37 | 0.1 | 0.0010 | | 19 | 330 | 00:02:57 | 0.50 | 0.2 | 0.0010 | | 20 | 360 | 00:03:14 | 0.37 | 0.1 | 0.0010 | | 22 | 390 | 00:03:31 | 0.36 | 0.1 | 0.0010 | | 24 | 420 | 00:03:47 | 0.43 | 0.2 | 0.0010 | | 25 | 450 | 00:04:03 | 0.54 | 0.3 | 0.0010 | | 27 | 480 | 00:04:18 | 0.54 | 0.3 | 0.0010 | | 29 | 510 | 00:04:32 | 0.66 | 0.4 | 0.0010 | | 30 | 540 | 00:04:47 | 0.38 | 0.1 | 0.0010 | |========================================================================================| Training finished: Max epochs completed. Detector training complete. *************************************************************************
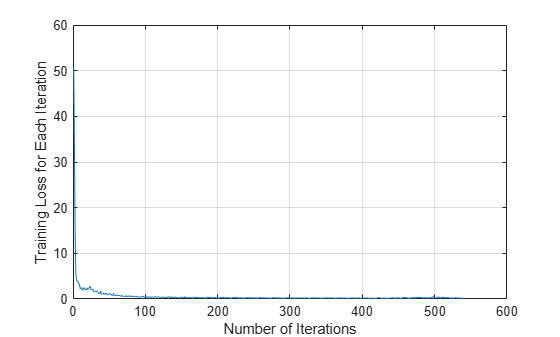
反復ごとの学習損失を調べ、学習精度を確認します。
figure plot(info.TrainingLoss) grid on xlabel("Number of Iterations") ylabel("Training Loss for Each Iteration")
テスト イメージをワークスペースに読み取ります。
img = imread("detectcars.png");学習済みの YOLO v2 オブジェクト検出器をテスト イメージに対して実行し、車両検出を行います。
[bboxes,scores] = detect(trainedDetector,img);
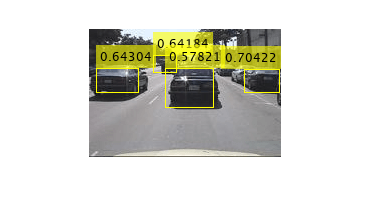
検出結果を表示します。
if(~isempty(bboxes)) img = insertObjectAnnotation(img,"rectangle",bboxes,scores); end figure imshow(img)