distance
Confidence value of measurement
Description
d = distance(
computes a distance between the location of a detected object and the predicted location by
the Kalman filter object. This distance computation takes into account the covariance of the
predicted state and the process noise. The kalmanFilter,zmatrix)distance
function can only be called after the predict
function.
Use the distance function to find the best matches.
The computed distance values describe how a set of measurements matches the Kalman filter.
You can thus select a measurement that best fits the filter. This strategy can be used for
matching object detections against object tracks in a multiobject tracking problem. This
distance computation takes into account the covariance of the predicted state and the
process noise.
Examples
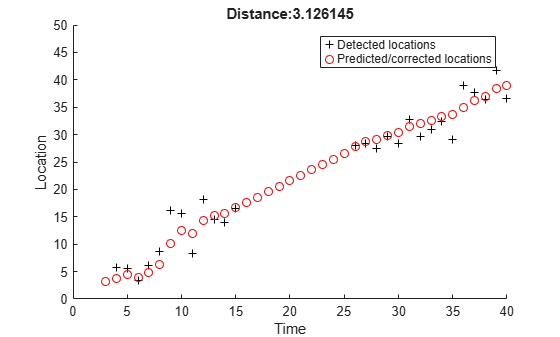
Track the location of a physical object moving in one direction.
Generate synthetic data which mimics the 1-D location of a physical object moving at a constant speed.
detectedLocations = num2cell(2*randn(1,40) + (1:40));
Simulate missing detections by setting some elements to empty.
detectedLocations{1} = [];
for idx = 16: 25
detectedLocations{idx} = [];
endCreate a figure to show the location of detections and the results of using the Kalman filter for tracking.
figure; hold on; ylabel('Location'); ylim([0,50]); xlabel('Time'); xlim([0,length(detectedLocations)]);
Create a 1-D, constant speed Kalman filter when the physical object is first detected. Predict the location of the object based on previous states. If the object is detected at the current time step, use its location to correct the states.
kalman = []; for idx = 1: length(detectedLocations) location = detectedLocations{idx}; if isempty(kalman) if ~isempty(location) stateModel = [1 1;0 1]; measurementModel = [1 0]; kalman = vision.KalmanFilter(stateModel,measurementModel,'ProcessNoise',1e-4,'MeasurementNoise',4); kalman.State = [location, 0]; end else trackedLocation = predict(kalman); if ~isempty(location) plot(idx, location,'k+'); d = distance(kalman,location); title(sprintf('Distance:%f', d)); trackedLocation = correct(kalman,location); else title('Missing detection'); end pause(0.2); plot(idx,trackedLocation,'ro'); end end legend('Detected locations','Predicted/corrected locations');
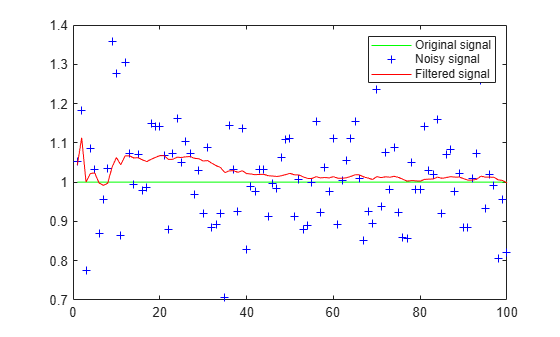
Use Kalman filter to remove noise from a random signal corrupted by a zero-mean Gaussian noise.
Synthesize a random signal that has value of 1 and is corrupted by a zero-mean Gaussian noise with standard deviation of 0.1.
x = 1; len = 100; z = x + 0.1 * randn(1,len);
Remove noise from the signal by using a Kalman filter. The state is expected to be constant, and the measurement is the same as state.
stateTransitionModel = 1; measurementModel = 1; obj = vision.KalmanFilter(stateTransitionModel,measurementModel,'StateCovariance',1,'ProcessNoise',1e-5,'MeasurementNoise',1e-2); z_corr = zeros(1,len); for idx = 1: len predict(obj); z_corr(idx) = correct(obj,z(idx)); end
Plot results.
figure, plot(x * ones(1,len),'g-'); hold on; plot(1:len,z,'b+',1:len,z_corr,'r-'); legend('Original signal','Noisy signal','Filtered signal');
Input Arguments
More About
Version History
Introduced in R2012b