Optical Flow
オブジェクト速度の推定

ライブラリ:
Computer Vision Toolbox /
Analysis & Enhancement
説明
Optical Flow ブロックは、Horn-Schunck 法または Lucas-Kanade 法のいずれかを使用して、2 つのイメージの間、または 1 つのビデオ フレームと別のビデオ フレームとの間のオブジェクトの動きの方向と速度を推定します。
例
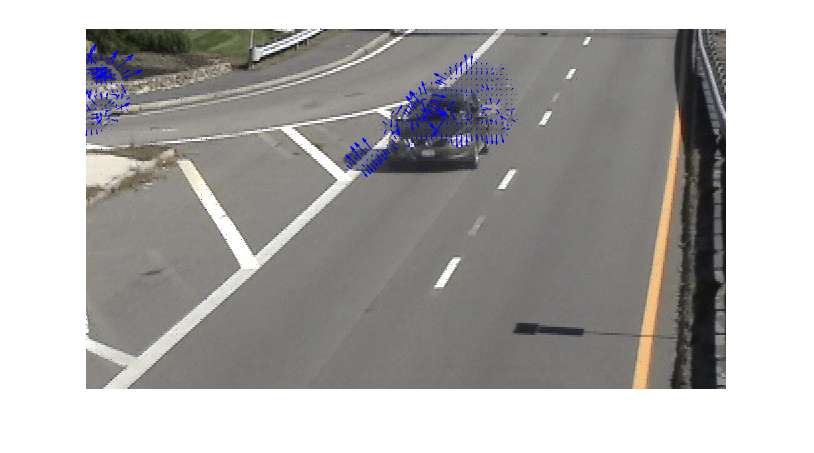
オプティカル フローの速度の計算
この例では、ビデオやイメージ シーケンス内で移動するオブジェクトのオプティカル フローの速度を計算する方法を示します。
端子
入力
出力
パラメーター
ブロックの特性
データ型 |
|
多次元信号 |
|
可変サイズの信号 |
|
アルゴリズム
時間勾配フィルターを [ガウス導関数] に設定すると、u と v は次の手順を使用して解かれます。
および を計算します。
ガウス フィルターを使用して時間フィルター処理を実行します。[時間的平滑化のためにバッファリングするフレームの数] パラメーターを使用して、標準偏差やフィルター係数の数などの時間フィルターの特性を指定します。
ガウス フィルターとガウス フィルターの導関数を使用して、空間フィルター処理を使用したイメージの平滑化を実行します。[イメージ平滑化フィルターの標準偏差] パラメーターを使用して、イメージ平滑化フィルターの標準偏差と長さを指定します。
イメージ 1 と 2 の間の を計算します。
ガウス フィルターの導関数を使用して時間フィルター処理を実行します。[時間的平滑化のためにバッファリングするフレームの数] パラメーターを使用して、標準偏差やフィルター係数の数などの時間フィルターの特性を指定します。
手順 1b に示したフィルターを使用して、時間フィルターの出力で空間フィルター処理を実行します。
勾配平滑化フィルターを使用して、勾配成分 、 および を平滑化します。[勾配平滑化フィルターの標準偏差] パラメーターを使用して、勾配平滑化フィルターの標準偏差とフィルター係数の数を指定します。
次のメソッドを使用して、各ピクセルについて 2 行 2 列の線形方程式を解きます。
の場合
A の固有値は です。
固有値を検出すると、ブロックはその固有値としきい値 を比較します。このしきい値は、[ノイズ除去のしきい値] パラメーターに入力した値に対応します。結果は次のいずれかになります。
ケース 1: かつ
A は非特異であるため、ブロックはクラメルの公式を使用して連立方程式を解きます。
ケース 2: かつ
A は特異 (不可逆) であるため、ブロックは勾配フローを正規化して u と v を計算します。
ケース 3: かつ
オプティカル フロー u と v は 0 です。

拡張機能
バージョン履歴
R2006a より前に導入