Three-axis Inertial Measurement Unit
3 軸慣性計測ユニット (IMU) の実装
ライブラリ:
Vehicle Dynamics Blockset /
Sensors
説明
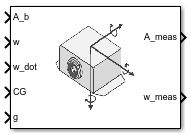
Three-Axis Inertial Measurement Unit ブロックは、3 軸加速度計と 3 軸ジャイロスコープを含む慣性計測ユニット (IMU) を実装します。
方程式と誤差の適用の詳細については、Three-axis Accelerometer (Aerospace Blockset)およびThree-axis Gyroscope (Aerospace Blockset)を参照してください。
例

ダブル レーン チェンジ リファレンス アプリケーション
ダブル レーン チェンジ操縦の ISO 3888-2 規格における車両運動モデル全体をシミュレート。車両運動の走行およびハンドリング解析やシャシー制御開発で、ヨー安定性や横方向加速度の制限などに使用。
制限
バイブロ振子誤差、ヒステリシス効果、非等弾性バイアス、および非等慣性バイアスは、このブロックでは考慮されません。
このブロックは、さまざまな形式の計器の内部ダイナミクスをモデル化することを目的としていません。
端子
入力
出力
パラメーター
参照
[1] Rogers, R. M., Applied Mathematics in Integrated Navigation Systems, AIAA Education Series, 2000.
拡張機能
バージョン履歴
R2020a で導入
参考
Three-axis Gyroscope (Aerospace Blockset) | Three-axis Accelerometer (Aerospace Blockset)