INS ブロックのシミュレーション
R2021b 以降
この例では、左折の軌跡をたどるビークルの姿勢情報を使用して INS ブロックをシミュレートします。
ビークルの軌跡データの読み込み
まず、ビークルの軌跡情報をワークスペースに読み込みます。
load leftTurnTrajectory.mat7 つの新しい変数が MATLAB® ワークスペースに表示されることがわかります。
dt— タイム ステップ サイズ 0.4 秒。t— 合計時間範囲 7.88 秒。vehPos、vehVel、vehAcc、vehOrient、vehAngVel— 位置、速度、加速度、向き、角速度の履歴。それぞれ 198 行 3 列の行列として指定します。ここで、198 は合計ステップ数です。
Simulink モデルを開く
次に、Simulink® モデルを開きます。
open simulateINS.slxans = logical
1
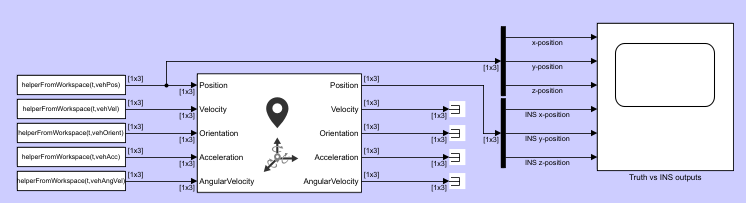
モデルは 3 つの部分で構成されています。データ インポート パート、INS ブロック、実際の位置を INS の出力と比較するスコープ ブロックです。
データ インポート パートでFrom Workspace (Simulink)ブロックを使用してビークルの軌跡データを Simulink にインポートします。例のフォルダーに添付されている補助関数 helperFromWorkspace を使用して、軌跡データを From Workspace ブロックで必要な構造体形式に変換します。
モデルの実行
Simulink モデルを実行します。
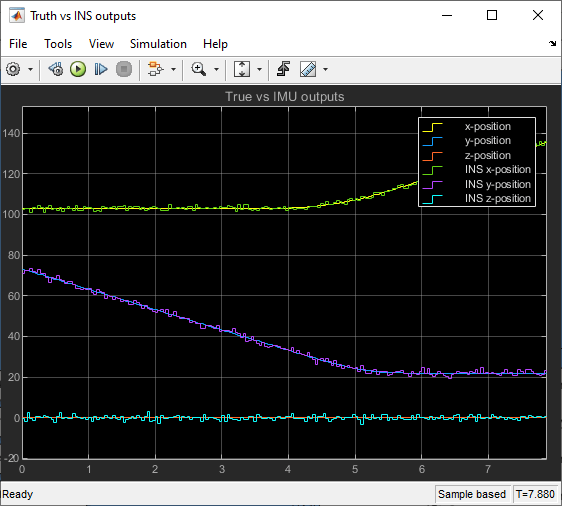
resulsts = sim('simulateINS');スコープ ブロックをクリックして結果を確認します。ノイズは加わっていますが、INS ブロックの位置の出力が実際の位置に密接に追従しています。