multirotorFlightTrajectory
Description
The multirotorFlightTrajectory object stores a multirotor UAV trajectory created
by using piecewise 9th degree polynomial to interpolate linear
positions and the cubicpolytraj function to interpolate yaw angles
between specified waypoints.
Creation
Description
T = multirotorFlightTrajectory(
creates a wpts,vels,accs,jerks,snaps,yaws,toas)multirotorFlightTrajectory object, T using the
specified waypoints wpts, velocities vels,
accelerations accs, jerks jerks, snaps
snaps, yaws yaws, and times of arrival
toas. The input arguments set the Waypoints,
Velocities, Accelerations,
Jerks, Snaps, Yaws, and
TimeOfArrival properties, respectively.
Input Arguments
Properties
Object Functions
Examples
Create a UAV mission by using the flight plan stored in a .plan file and show the mission.
mission = uavMission(PlanFile="flight.plan"); show(mission); axis equal
Create parsers for a multirotor UAV and a fixed-wing UAV.
mrmParser = multirotorMissionParser(TransitionRadius=2,TakeoffSpeed=2); fwmParser = fixedwingMissionParser(TransitionRadius=15,TakeoffPitch=10);
Generate one flight trajectory using each parser.
mrmTraj = parse(mrmParser,mission); fwmTraj = parse(fwmParser,mission);
Visualize the waypoints, flight trajectory and body frames for each UAV.
figure show(mrmTraj,FrameSize=20,NumSamples=75); title("Multirotor Flight Trajectory") axis equal

figure show(fwmTraj,FrameSize=20,NumSamples=75); title("Fixed-Wing Flight Trajectory") axis equal

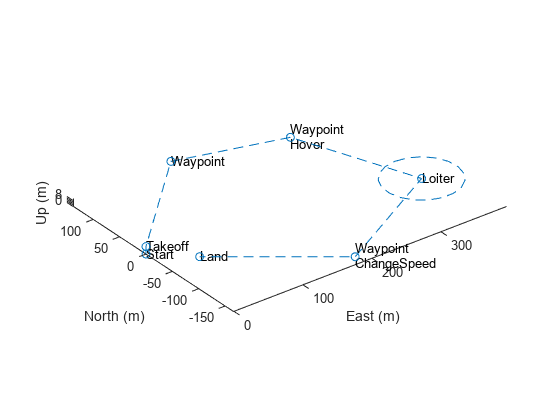
Plot the mission, waypoints, flight trajectory and UAV body frames in the same plot for each UAV.
figure show(mission); hold on show(mrmTraj,FrameSize=20,NumSamples=75); hold off title("Mission Using Multirotor Trajectory") axis equal

show(mission); hold on show(fwmTraj,FrameSize=20,NumSamples=75); hold off title("Mission Using Fixed-Wing Trajectory") axis equal

Create a set of waypoints for both the multirotor and the fixed-wing UAV to follow.
wpts = [0 0 0;
2 2 -2;
10 10 -3;
12 12 -6];
numwpts = size(wpts);Specify additional trajectory information, such as desired velocities, accelerations, jerks, snaps, and yaws, as well as start time, an end time, and times of arrival.
vels = 2*ones(numwpts); accs = ones(numwpts); jerks = zeros(numwpts); snaps = zeros(numwpts); yaws = zeros(1,numwpts(1)); starttime = 0; endtime = 8; toas = linspace(starttime,endtime,numwpts(1));
Use the trajectory information to create the flight trajectories for the multirotor and the fixed-wing UAVs. Query and display the trajectories.
mrft = multirotorFlightTrajectory(wpts,vels,accs,jerks,snaps,yaws,toas); fwft = fixedwingFlightTrajectory(wpts,vels,toas); query(mrft,1:4)
ans = 4×16
1.6184 1.6184 0.7520 -0.0243 -0.0243 -2.8758 -4.6045 -4.6045 -9.1669 0.9863 -0.1179 0.1147 -0.0137 0.0732 -0.0732 -0.0000
1.0236 1.0236 -2.7807 0.5482 0.5482 -0.6198 3.9704 3.9704 8.6424 0.7429 0.5559 -0.2987 -0.2235 -1.3257 1.3257 0
2.7277 2.7277 -1.2947 2.4069 2.4069 2.1026 1.7442 1.7442 -1.3857 0.9941 0.0770 -0.0761 -0.0059 0.1950 -0.1950 0.0000
6.4028 6.4028 -2.0972 4.4609 4.4609 -3.8447 -1.1875 -1.1875 -1.1875 0.9971 -0.0537 0.0534 -0.0029 -1.2364 1.2364 0
query(fwft,1:4)
ans = 4×16
0.9453 0.9453 -0.3203 0.2422 0.2422 -1.8672 -0.7031 -0.7031 -1.5469 0.7098 -0.2450 0.5914 0.2940 -0.4683 0.4683 0.0000
1.1875 1.1875 -2.1875 0.5938 0.5938 -1.0938 1.4063 1.4062 3.0938 0.8287 -0.1692 0.4085 0.3432 1.7750 -1.7750 0.0000
2.7813 2.7812 -1.6055 2.6563 2.6562 0.4414 1.6875 1.6875 -4.0078 0.9223 0.0224 -0.0540 0.3820 -0.7962 0.7962 -0.0000
6.0000 6.0000 -2.5000 3.5000 3.5000 -1.5625 -0.0000 -0.0000 0.0000 0.9131 -0.0583 0.1407 0.3782 -0.0000 -0.0000 0.0000
Visualize both the multirotor flight trajectory and the fixed-wing flight trajectory.
ax = show(mrft,NumSamples=200);
title("Multirotor Flight Trajectory")
view([0 0])
show(fwft,NumSamples=50);
title("Fixed-Wing UAV Flight Trajectory")
view([0 0])
Extended Capabilities
Version History
Introduced in R2022b