INS

ライブラリ:
Navigation Toolbox /
Multisensor Positioning /
Sensor Models
Automated Driving Toolbox /
Driving Scenario and Sensor Modeling
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Sensor Models
UAV Toolbox /
UAV Scenario and Sensor Modeling
説明
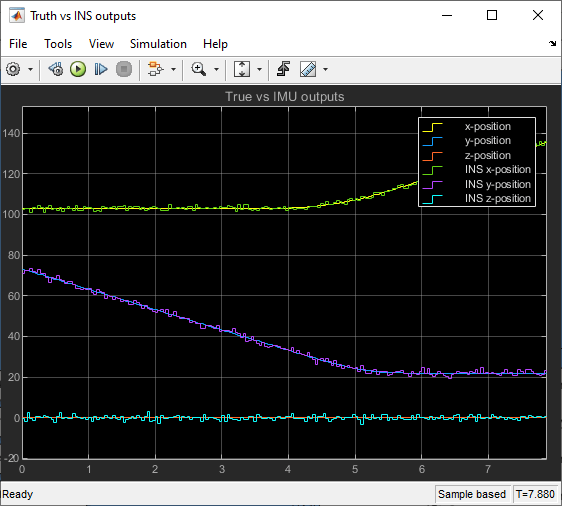
このブロックは INS センサーをシミュレーションし、対応する入力に基づいてノイズが加えられた位置、速度、および方向を出力します。このブロックは、オプションで、対応する入力に基づいて加速度と角速度を出力することもできます。出力に含まれるノイズ レベルを変更するには、ロール、ピッチ、ヨー、位置、速度、加速度、および角速度の精度を変更します。精度はノイズの標準偏差として定義されています。
例
端子
入力
ナビゲーション座標系を基準とした INS センサーの位置 (メートル単位)。N 行 3 列の実数値の行列として指定します。N はサンプル数です。
データ型: single | double
ナビゲーション座標系を基準とした INS センサーの速度 (メートル/秒単位)。N 行 3 列の実数値の行列として指定します。N はサンプル数です。
データ型: single | double
ナビゲーション座標系を基準とした INS センサーの向き。次のいずれかの形式として指定します。
3×3×N の実数値配列。配列の各ページ (3 行 3 列の行列) は回転行列です。
N 行 4 列の実数値の行列。行列の各行は四元数の 4 つの要素です。
N 行 3 列のオイラー角の行列。行列の各行は z-y-x 回転規則に対応する 3 つのオイラー角です。
N はサンプル数です。
データ型: single | double
ナビゲーション座標系を基準とした INS センサーの加速度 (メートル毎秒毎秒単位)。N 行 3 列の実数値の行列として指定します。N はサンプル数です。
依存関係
この入力端子を有効にするには、[加速度と角速度の使用] を選択します。
データ型: single | double
ナビゲーション座標系を基準とした INS センサーの角速度 (度/秒単位)。N 行 3 列の実数値の行列として指定します。N はサンプル数です。
依存関係
この入力端子を有効にするには、[加速度と角速度の使用] を選択します。
データ型: single | double
GNSS 確定の有効化。N 行 1 列の logical ベクトルとして指定します。N はサンプル数です。GNSS 受信機の確定の損失をシミュレーションするには、この入力を false として指定します。GNSS 受信機の確定が失われると、位置測定は [位置誤差要因] パラメーターで指定された割合でドリフトします。
依存関係
この入力端子を有効にするには、[HasGNSSFix 端子の有効化] を選択します。
データ型: single | double
出力
ナビゲーション座標系を基準とした INS センサーの位置 (メートル単位)。N 行 3 列の実数値の行列として返されます。N は入力のサンプル数です。
データ型: single | double
ナビゲーション座標系を基準とした INS センサーの速度 (メートル/秒単位)。N 行 3 列の実数値の行列として返されます。N は入力のサンプル数です。
データ型: single | double
ナビゲーション座標系を基準とした INS センサーの向き。次のいずれかの形式として返されます。
3×3×N の実数値配列。配列の各ページ (3 行 3 列の行列) は回転行列です。
N 行 4 列の実数値の行列。行列の各行は四元数の 4 つの要素です。
N 行 3 列のオイラー角の行列。行列の各行は z-y-x 回転規則に対応する 3 つのオイラー角です。
N は入力のサンプル数です。
データ型: single | double
ナビゲーション座標系を基準とした INS センサーの加速度 (メートル毎秒毎秒単位)。N 行 3 列の実数値の行列として返されます。N はサンプル数です。
依存関係
この出力端子を有効にするには、[加速度と角速度の使用] を選択します。
データ型: single | double
ナビゲーション座標系を基準とした INS センサーの角速度 (度/秒単位)。N 行 3 列の実数値の行列として返されます。N はサンプル数です。
依存関係
この出力端子を有効にするには、[加速度と角速度の使用] を選択します。
データ型: single | double
パラメーター
プラットフォーム上のセンサーの位置 (メートル単位)。[x y z] 形式の 3 要素の実数値ベクトルとして指定します。このベクトルは、プラットフォームの原点からのセンサーの原点のオフセットを定義します。
データ型: single | double
センサー ボディのロール測定精度 (度単位)。非負の実数スカラーとして指定します。
ロールはセンサー ボディの x 軸を中心とした回転として定義されます。ロール ノイズは、標準偏差が指定された [ロール精度] (度単位) と等しいホワイト プロセス ノイズとしてモデル化されます。
データ型: single | double
センサー ボディのピッチ測定精度 (度単位)。非負の実数スカラーとして指定します。
ピッチはセンサー ボディの y 軸を中心とした回転として定義されます。ピッチ ノイズは、標準偏差が指定された [ピッチ精度] (度単位) と等しいホワイト プロセス ノイズとしてモデル化されます。
データ型: single | double
センサー ボディのヨー測定精度 (度単位)。非負の実数スカラーとして指定します。
ヨーはセンサー ボディの z 軸を中心とした回転として定義されます。ヨー ノイズは、標準偏差が指定された [ヨー精度] (度単位) と等しいホワイト プロセス ノイズとしてモデル化されます。
データ型: single | double
センサー ボディの位置測定精度 (メートル単位)。非負の実数スカラーまたは非負の値の 1 行 3 列のベクトルとして指定します。このパラメーターをスカラー値として指定すると、ブロックは 3 つの位置成分すべての精度をその値に設定します。
位置ノイズは、標準偏差が指定された [位置の精度] (メートル単位) と等しいホワイト プロセス ノイズとしてモデル化されます。
データ型: single | double
センサー ボディの速度測定精度 (メートル/秒単位)。非負の実数スカラーとして指定します。
速度ノイズは、標準偏差が指定された [速度の精度] (メートル/秒単位) と等しいホワイト プロセス ノイズとしてモデル化されます。
データ型: single | double
Acceleration 入力端子と AngularVelocity 入力端子を介してそれぞれ加速度と角速度のブロック入力を有効にするには、このチェック ボックスをオンにします。一方、ブロックは、Acceleration 出力端子と AngularVelocity 出力端子を介してそれぞれ加速度と角速度の測定値を出力します。また、このパラメーターを選択すると、[加速度の精度] パラメーターと [角速度の精度] パラメーターを指定できます。
センサー ボディの加速度測定精度 (メートル単位)。非負の実数スカラーとして指定します。
加速度ノイズは、標準偏差が指定された [加速度の精度] (メートル毎秒毎秒単位) と等しいホワイト プロセス ノイズとしてモデル化されます。
依存関係
このパラメーターを有効にするには、[加速度と角速度の使用] を選択します。
データ型: single | double
センサー ボディの角速度測定精度 (メートル単位)。非負の実数スカラーとして指定します。
角速度ノイズは、標準偏差が指定された [角速度の精度] (度/秒単位) と等しいホワイト プロセス ノイズとしてモデル化されます。
依存関係
このパラメーターを有効にするには、[加速度と角速度の使用] を選択します。
データ型: single | double
HasGNSSFix 入力端子を有効にするには、このチェック ボックスをオンにします。HasGNSSFix 入力が false として指定されている場合、位置測定は [位置誤差要因] パラメーターで指定された割合でドリフトします。
GNSS 確定なしの位置誤差要因。スカラーまたは 1 行 3 列の実数値ベクトルとして指定します。このパラメーターをスカラー値として指定すると、ブロックは 3 つの位置成分すべての位置誤差要因をその値に設定します。
HasGNSSFix 入力が false として指定されている場合、加速度計の一定のバイアスのため、位置誤差は 2 次関数的に増加します。位置成分 E(t) の位置誤差は、E(t) = 1/2αt2 と表すことができます。ここで、α は対応する成分の位置誤差係数であり、t は GNSS 確定が失われてからの時間です。x、y、および z 成分の計算された E(t) 値は、Position 出力の対応する位置成分に加算されます。
依存関係
このパラメーターを有効にするには、[HasGNSSFix 端子の有効化] を選択します。
データ型: double
乱数発生器アルゴリズムの初期シード。非負の整数として指定します。
データ型: single | double
インタープリター型実行— MATLAB® インタープリターを使用してモデルをシミュレーションします。このオプションにより、起動時間が短縮されます。インタープリター型実行モードでは、ブロックのソース コードをデバッグできます。コード生成— 生成される C コードを使用してモデルをシミュレーションします。シミュレーションをはじめて実行すると、Simulink® によってブロック用の C コードが生成されます。モデルが変更されない場合、この C コードは後続のシミュレーションで再利用されます。このオプションにより、起動時間が長くなります。
拡張機能
C/C++ コード生成
Simulink® Coder™ を使用して C および C++ コードを生成します。
バージョン履歴
R2021b で導入
MATLAB Command
You clicked a link that corresponds to this MATLAB command:
Run the command by entering it in the MATLAB Command Window. Web browsers do not support MATLAB commands.
Web サイトの選択
Web サイトを選択すると、翻訳されたコンテンツにアクセスし、地域のイベントやサービスを確認できます。現在の位置情報に基づき、次のサイトの選択を推奨します:
また、以下のリストから Web サイトを選択することもできます。
最適なサイトパフォーマンスの取得方法
中国のサイト (中国語または英語) を選択することで、最適なサイトパフォーマンスが得られます。その他の国の MathWorks のサイトは、お客様の地域からのアクセスが最適化されていません。
南北アメリカ
- América Latina (Español)
- Canada (English)
- United States (English)
ヨーロッパ
- Belgium (English)
- Denmark (English)
- Deutschland (Deutsch)
- España (Español)
- Finland (English)
- France (Français)
- Ireland (English)
- Italia (Italiano)
- Luxembourg (English)
- Netherlands (English)
- Norway (English)
- Österreich (Deutsch)
- Portugal (English)
- Sweden (English)
- Switzerland
- United Kingdom (English)