GPS
ライブラリ:
UAV Toolbox /
UAV Scenario and Sensor Modeling
Navigation Toolbox /
Multisensor Positioning /
Sensor Models
Sensor Fusion and Tracking Toolbox /
Multisensor Positioning /
Sensor Models
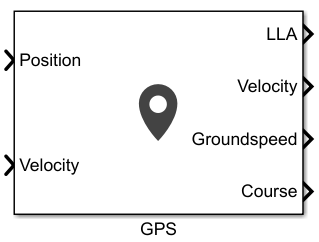
説明
このブロックは、ローカル座標系または測地座標系での入力位置と速度に基づいて、ノイズで破損した GPS 測定値を出力します。WGS84 地球モデルを使用して、ローカル座標を緯度-経度-高度の LLA 座標に変換します。
例
Add GPS Sensor Noise to Multirotor Guidance Model
Use a gpsSensor Block to add sensor noise to the position and velocity output of a guidance model in Simulink®.

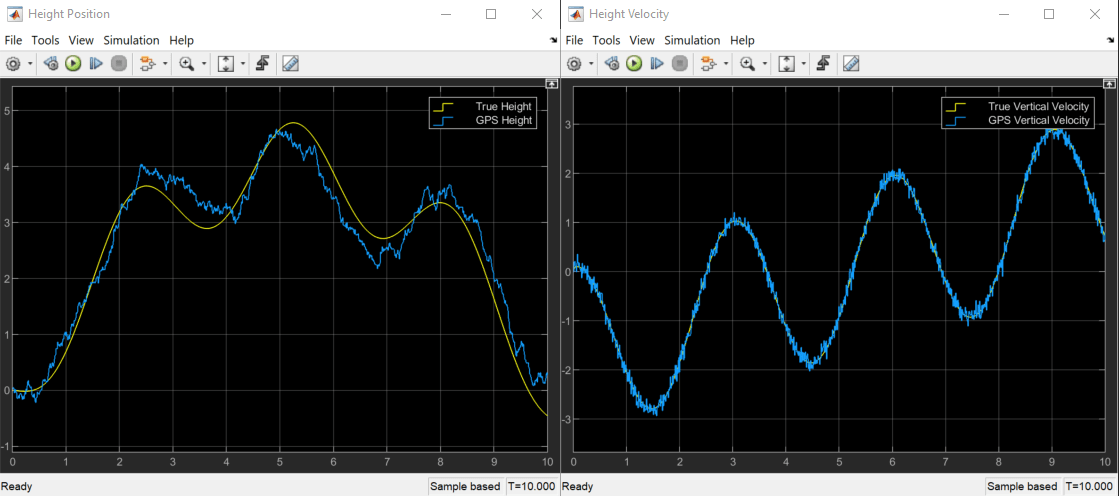
Simulate GPS Sensor Noise
Use the GPS block to add GPS sensor noise to position and velocity inputs in Simulink®.
端子
入力
出力
パラメーター
拡張機能
バージョン履歴
R2021b で導入