ハードウェアインザループ (HITL) シミュレーションでの展開用の Simulink モデルの構成
Simulink での PX4 コントローラー モデルの構成
ハードウェア セットアップ プロセスの完了後、UAV Toolbox Support Package for PX4® Autopilots で利用可能な Simulink® ブロックを使用してフライト コントローラーのアルゴリズムを準備します。次の手順を実行して Simulink モデルを構成します。
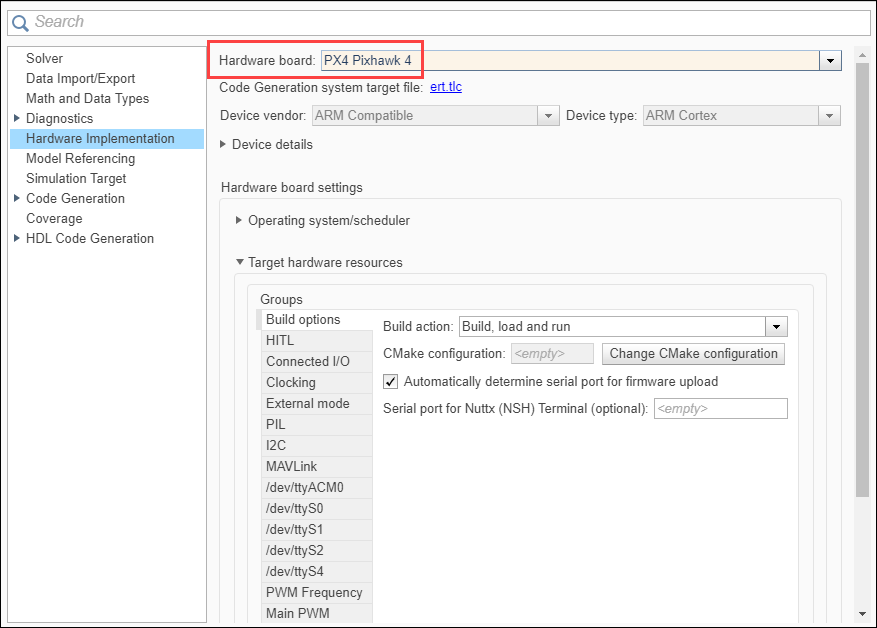
[モデル化] タブの [モデル設定] をクリックします。
[コンフィギュレーション パラメーター] ダイアログ ボックスで、任意の Pixhawk® シリーズのボードを選択します。
[HITL] をクリックし、[Enable HITL Mode] を選択します。
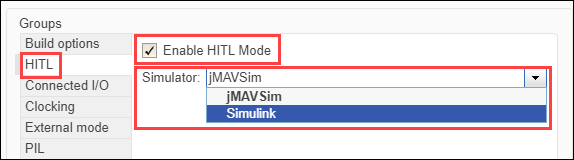
シミュレーターとして
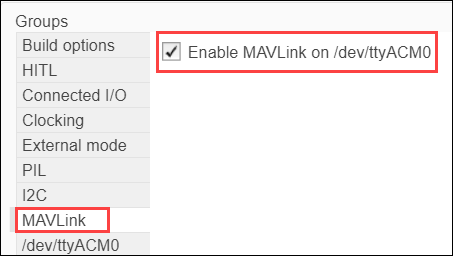
[Simulink]を選択します。[MAVLink] をクリックし、[Enable MAVLink on /dev/ttyACM0] オプションが選択されていることを確認します。
[適用] をクリックし、[OK] をクリックします。
参考
ハードウェアインザループ (HITL) シミュレーション用の PX4 Firmware のセットアップ | Configure Simulink Model for Monitor & Tune Simulation with Hardware-in-the-Loop (HITL)