ハードウェアインザループ (HITL) シミュレーション用の PX4 Firmware のセットアップ
UAV Toolbox Support Package for PX4® Autopilots には、PX4 Autopilot にコントローラーを展開し、ハードウェアインザループ (HITL) シミュレーションを実行してアルゴリズムを検証するオプションが用意されています。このワークフローは、ハードウェアインザループ シミュレーション (HITL) に基づいています。
PX4 Firmware のセットアップ
以下で実行する手順は、UAV Toolbox Support Package for PX4 Autopilots のハードウェア セットアップ プロセスの一部であり、HITL シミュレーション用に PX4 Autopilot を有効にするものです。
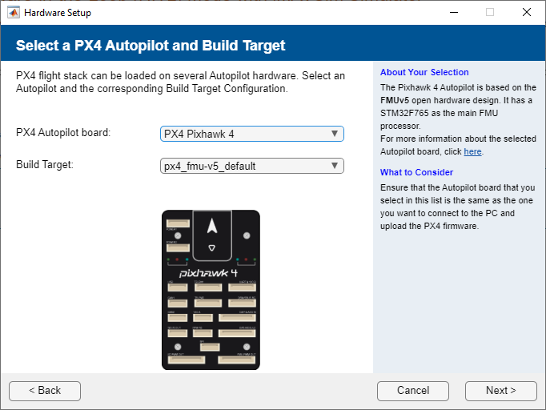
[ハードウェア セットアップ] 画面の [Select a PX4 Autopilot and Build Target] で、ハードウェア ボードとして任意の Pixhawk® シリーズのボードを選択します。たとえば、PX4 Pixhawk 4 です。[次へ] をクリックします。
メモ
この機能は PX4 ボードのみをサポートしており、PX4 ホスト ターゲットをサポートしていません。
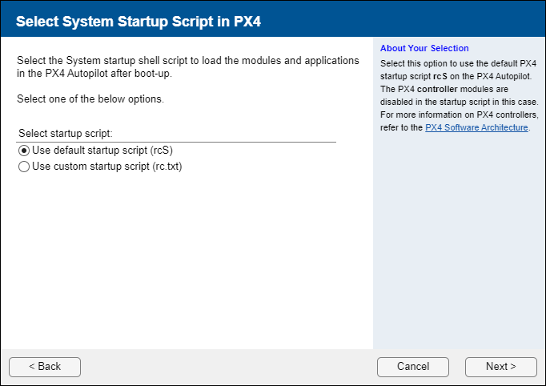
[ハードウェア セットアップ] 画面の [Select System Startup Script in PX4] で、[Use default startup script(rcS)] を選択して [次へ] をクリックします。
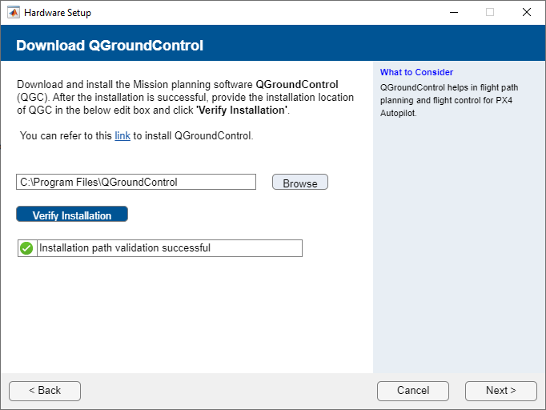
[ハードウェア セットアップ] 画面の [Download QGroundControl] で、QGC をダウンロードしてインストールします。インストール後、[インストールを検証] をクリックしてから、[次へ] をクリックします。
ハードウェア セットアップ プロセスの以降の手順に進んで、ファームウェアをビルドし、ビルドが正常に完了したことを確認します。
参考
ハードウェアインザループ (HITL) シミュレーションでの展開用の Simulink モデルの構成 | Configure Simulink Model for Monitor & Tune Simulation with Hardware-in-the-Loop (HITL)