Onshape のヒューマノイド モデルのインポート
CAD アセンブリ モデルを Onshape® ソフトウェアから Simscape™ Multibody™ 環境にインポートすることができます。インポート処理は、関数 smexportonshape と関数 smimport をベースにした 2 つの手順で行います。smexportonshape は、アセンブリ モデルを Simscape Multibody の XML スキーマに準拠した中間 XML にエクスポートします。関数 smimport は、中間 XML ファイルを元の Onshape モデルの Simscape Multibody バージョンに変換します。
例の概要
この例では、ヒューマノイド ロボット アセンブリの Onshape モデルをインポートする方法を説明します。モデルは、ロボットの胴部、頭部、および四肢を表すさまざまなパーツで構成されています。パーツは、各種のジョイントを表す [Revolute] メイトを介して接続されています。モデルは、URDF のヒューマノイド モデルのインポートで説明されているものと同じです。次の URL を Web ブラウザーに入力し、モデルにアクセスします (Onshape へのログインが必要)。
https://cad.onshape.com/documents/5817806f96eae5105bfa5085/w/15ab3bfb58cacbf427d77ff3/e/181493813f84966648a8db1b
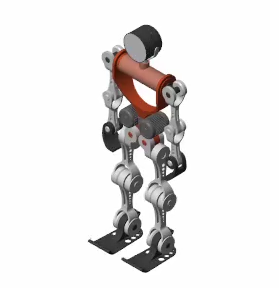
モデルの構成図

モデルのエクスポート
関数 smexportonshape を使用して、次の手順でモデルをエクスポートします。
MATLAB® コマンド プロンプトで、たとえば次のように、書き込み権限のあるフォルダーに移動します。
cd C:\Users\JDoe\Documents\Modelsモデルの URL を
assemblyURLという名前の MATLAB 変数に格納します。assemblyURL = "https://cad.onshape.com/documents/5817806f96eae5105bfa5085/w/15ab3bfb58cacbf427d77ff3/e/181493813f84966648a8db1b";モデルをエクスポートし、XML ファイル名を
exportedModelという名前の変数に保存します。exportedModel = smexportonshape(assemblyURL);
Onshape アカウントにログインするように求められる場合があります。関数
smexportonshapeは、このモデル用の XML マルチボディ記述ファイルと、さまざまなパーツ ジオメトリ用の一連の STEP ファイルを生成します。
モデルのインポート
関数 smimport を使用して、XML マルチボディ記述ファイルをインポートします。
smimport(exportedModel);
この関数によって、ヒューマノイド ロボットの Simscape Multibody モデルが生成されます。

各部のジョイントを作動させる制御システムの追加などを行い、モデルの作成を進めます。制御された例を見るには、MATLAB コマンド プロンプトで「OpenExample('sm/ImportedURDFExample')」と入力します。モデルをシミュレーションし、単純なアニメーションを表示します。