整数オーバーフローとゼロ除算エラーの検出
以下の節では、sldvdemo_cruise_control_fxp_fixed モデルの整数オーバーフローおよびゼロ除算エラーを解析する方法について説明します。
モデルの解析
モデルを開き、整数オーバーフローおよびゼロ除算エラーがあるかどうかをチェックします。
1.sldvdemo_cruise_control_fxp_fixed モデルを開きます。
open_system('sldvdemo_cruise_control_fxp_fixed');2.[Design Verifier] タブの [準備] セクションのモード設定のドロップダウン メニューから、[設定] をクリックします。
3.[コンフィギュレーション パラメーター] ダイアログ ボックスで、[Design Verifier]、[設計エラー検出] を選択します。
4.[設計エラー検出] ペインで以下を選択します。
整数のオーバーフロー
ゼロ除算
5.[コンフィギュレーション パラメーター] ダイアログ ボックスの [診断]、[データ有効性] ペインで、[信号] の [オーバーフロー時にラップ]、[信号] の [オーバーフローで飽和] を設定します。
6.[OK] をクリックしてそれらの設定を保存し、[コンフィギュレーション パラメーター] ダイアログ ボックスを閉じます。
7.[モード] セクションで、[設計エラー検出] を選択します。
8.[設計エラーの検出] をクリックします。
解析が完了すると、
解析結果に基づいてモデルが強調表示されます。
Simulink® Design Verifier™ の [結果] ダイアログ ボックスが開き、解析の概要が表示されます。
解析結果のレビュー
モデルの結果のレビュー
以下の手順からわかるように、派生範囲を使用することで取り得る信号値が特定され、エラーの原因把握に役立ちます。
1.sldvdemo_cruise_control_fxp_fixed モデルの最上位で、"Fixed-Point Controller" サブシステムをクリックします。
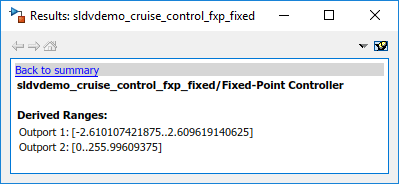
Simulink Design Verifier の [結果] ウィンドウに、解析で計算された Outport の取り得る信号値の派生範囲が表示されます。
Outport 1 (throt) の値の範囲は –2.6101 ~ 2.6096 です。
Outport 2 (target) の値の範囲は 0 ~ 255.9960 です。
2.sldvdemo_cruise_control_fxp_fixed モデルのそれぞれの Outport ブロックをクリックして、信号範囲の値が同じであることを確認します。
3.Fixed-Point Controller サブシステムを開きます。
このサブシステムの 2 つのオブジェクトがレッドの輪郭で表示されています。PI Controller サブシステムはグリーンの輪郭で表示されています。
4.レッドの輪郭の Sum ブロックをクリックします。これは PI Controller サブシステムにエラー入力を提供しています。

この Sum ブロックはオーバーフロー エラーを生成できます。この解析では、Sum ブロックの出力が [–128..127.9960] の範囲を超える計算結果となり得るテスト ケースが見つかりました。

5.このエラーについてより詳細に理解するには、Sum ブロックへの入力を提供する 2 つのブロックをクリックします。Simulink Design Verifier の [結果] ウィンドウで、その派生範囲を確認します。
Bus ブロックからの 3 番目の Outport の範囲は、[0..256] です。
Switch ブロックからの Outport の範囲は、[0..256] です。
これらの信号範囲の加算操作により Sum ブロックの Outport の範囲 [–128..128] を超える値が算出される可能性があることがわかります。
解析により、Sum ブロックのオーバーフロー エラーがレポートされます。解析はこのエラーを伝播せず、Sum ブロック出力がその後の計算で有効範囲内になると仮定します。
6.グリーンの輪郭の PI Controller サブシステムをクリックします。PI Controller サブシステム内のブロックは、オーバーフローまたはゼロ除算エラーを生成できません。PI Controller サブシステムが解析される際に、Sum ブロックからのオーバーフローは無視され、サブシステムへの入力は有効であると仮定されます。
sldvdemo_cruise_control_fxp_fixed モデルは開いたままにします。次のセクションでは、Sum ブロックのオーバーフロー エラーを生成するテスト ケースを確認するためのハーネス モデルを作成します。
ハーネス モデルのレビュー
エラーの実例を示すテスト ケースを確認するため、Simulink Design Verifier の [結果] ウィンドウからハーネス モデルを生成します。
1.sldvdemo_cruise_control_fxp_fixed モデル内で、Fixed-Point Controller サブシステムを開きます。
2.レッドの輪郭の Sum ブロックをクリックします。これは PI Controller サブシステムにエラー入力を提供しています。
Simulink Design Verifier の [結果] ウィンドウに、オーバーフロー エラーが発生したという情報が表示されます。
3.Simulink Design Verifier の [結果] ウィンドウで、[反例を表示] をクリックします。
このオーバーフロー エラーの原因となる信号値をもつテスト ケースを含むハーネス モデルが作成されます。
ハーネス モデルで [信号エディター] ダイアログ ボックスが開き、Counterexample_4 が表示されます。
4.[すべて実行] ボタンをクリックして、このテスト ケースを含むモデルのシミュレーションを実行します。
シミュレーションは想定されたとおり、Fixed-Point Controller サブシステムの Sum ブロックにおけるオーバーフロー エラーにより失敗します。
詳細については、テスト シミュレーションのためのハーネス モデルの使用を参照してください。
解析レポートのレビュー
sldvdemo_cruise_control_fxp_fixed モデルの解析レポートに関する詳細情報を含む HTML レポートは、次の手順で表示します。
Simulink Design Verifier の [結果] ウィンドウで、[HTML] をクリックして詳細な解析レポートを確認します。
詳細な解析レポートが生成されます。これはブラウザーで開きます。
sldvdemo_cruise_control_fxp_fixed モデルについて、レポートの [設計エラー検出オブジェクティブのステータス] の章に詳細な結果が次の 2 つのカテゴリで表示されます。
有効なオブジェクティブ — エラーが生成されなかったモデル オブジェクト
反例によって反証されたオブジェクティブ — テスト ケースがエラーを生成したモデル オブジェクト
判定結果または条件結果をもつモデル オブジェクトは、デッド ロジック検出を受けます。判定オブジェクティブまたは条件オブジェクティブをもつモデル オブジェクトの完全なリストの詳細については、カバレッジの対象となるモデル オブジェクト (Simulink Coverage)を参照してください。
詳細については、解析レポートの結果の確認を参照してください。
メモ: 欠陥チェッカーでは、デッド ロジック、範囲外配列アクセス、ゼロ除算、整数オーバーフロー、および指定された最小値と最大値の違反のチェックが自動的に呼び出されます。チェックを指定するには、欠陥チェッカーを ‘オフ’ に設定します。詳細については、Detect Defects Using Optimized Checksを参照してください。