Structure of Device Driver System Object
A device driver block is a specialized MATLAB System block that generates custom C/C++ device driver code when deployed to an Arduino® hardware board. Device driver blocks provide easy access to hardware board features, such as communication protocols or hardware libraries, not included in the default Simulink Support Package for Arduino Hardware.
A Simulink® device driver block can be generalized to one of two groups based on their port types:
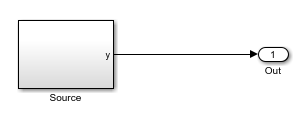
Source blocks have output ports only. In simulation, a source block outputs a predetermined signal. This signal can be created from a random number generator, a stored array, or a constant value. When deployed to hardware, a source block outputs data captured from the I/O device that the block represents. For example, when deployed to hardware, the digital read block outputs the logical state of the digital I/O pin.
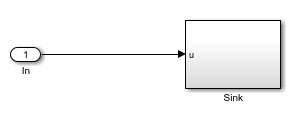
Sink blocks have input ports only. In simulation, a sink block acts as a Terminator block. When deployed to hardware, the sink block sets and updates the I/O device according to the input port signals. For example, when deployed to hardware, the digital write block sets and updates the logical state of the digital I/O pin equal to the input port signal.
To define the behavior of the device driver block, you use a System object™. Then you use a MATLAB System block to reference the
object and include it in a model. Each System object uses the setupImpl, stepImpl, and
releaseImpl methods to define the code initialization, pin output
behavior, and code termination for the device driver block. Through conditional
statements in the stepImpl, the device driver block operates in
simulation mode. This mode enables the entire model to run on the host computer either
when testing or when you do not have access to an Arduino. System objects also provide services for adding build artifacts. Such
artifacts include source files, include paths, shared libraries, and preprocessor
defines, to the Simulink generated code. These artifacts automatically define the port properties
of a block and generate a block mask.
Class Definition
At the top of the System object code, you define the name of your System object and the classes it inherits from.
classdef classname < matlab.System & coder.ExternalDependency & matlab.system.mixin.Propagates ... end
All System objects must inherit from matlab.System. In addition,
device driver System objects inherit from coder.ExternalDependency
that provides API’s to add build artifacts to generated code. The
matlab.system.mixin.Propagates class provides API’s to define the
output size, data type, and complexity of a System object. You can inherit from other classes, e.g.
matlab.system.mixin.CustomIcon, which lets you specify the name
and icon used by a MATLAB System Object block.
Constructor Method
The template System object class, used in the Create a Digital Write Block and Create a Digital Read Block guides, uses a standard constructor method:
methods % Constructor function obj = classname(varargin) coder.allowpcode('plain'); setProperties(obj,nargin,varargin); end ... end
Initialization, Output, and Termination Methods
These methods define what happens at initialization, output, and termination. Use
setupImpl to initialize the hardware peripheral. Use
stepImpl to read from or write to the hardware peripheral. Use
releaseImpl to release hardware resources used. These three
methods are the backbone of defining the behavior of a device driver block.
methods (Access=protected) function setupImpl(obj) % Implement tasks that need to be performed only once end function stepImpl(obj,u) % Device driver output end function releaseImpl(obj) % Termination code end end
Input and Output Signal Properties
This code section defines the number of inputs or outputs of a block and the data
types and sizes. For example, the getNumInputsImpl method in a sink
block, sets the number of input ports. Similarly, the
getNumOutputsImpl method in a source block sets the number of
outputs ports.
methods (Access=protected) % Simulink functions function isInputSizeMutableImpl(~,~) flag = false; end ... function num = getNumInputsImpl(~) num = 1; end function num = getNumOutputsImpl(~) num = 0; end end
Build Artifacts
The build artifacts define the source file locations, include paths, shared
libraries, library search paths, and preprocessor definitions required to compile
the device driver code. Use the getDescriptiveName method to define
an identification string to the System object. The code generation engine uses this string to report errors. Use the
isSupportedContext method to specify the code generation
context. In device driver blocks, only the real-time workshop (rtw) code generation
context applies, so this function always specifies 'rtw'. Use the
updateBuildInfo method to specify source and header files,
include paths, libraries, and defines required to build the System object.
methods (Static)
function name = getDescriptiveName()
name = 'decriptive name';
end
function tf = isSupportedContext(context)
tf = context.isCodeGenTarget('rtw');
end
function updateBuildInfo(buildInfo, context)
if context.isCodeGenTarget('rtw')
% Update buildinfo
srcDir = fullfile(fileparts(mfilename('fullpath')),'src'); %#ok<NASU>
includeDir = fullfile(fileparts(mfilename('fullpath')),'include');
addIncludePaths(buildInfo,includeDir);
% Use the following API's to add include files, sources and
% linker flags
%addIncludeFiles(buildInfo,'source.h',includeDir);
%addSourceFiles(buildInfo,'source.c',srcDir);
%addLinkFlags(buildInfo,{'-lSource'});
%addLinkObjects(buildInfo,'sourcelib.a',srcDir);
%addCompileFlags(buildInfo,{'-D_DEBUG=1'});
%addDefines(buildInfo,'MY_DEFINE_1')
end
end