Arduino CAN ブロックを使用したデータの送受信
この例では、Simulink® Support Package for Arduino® Hardware を使用して、指定した CAN デバイスを使い、CAN ネットワークからデータを送受信する方法を示します。
サポートされているハードウェア
Arduino Mega 2560
Arduino Mega ADK
Arduino Uno
Arduino Due
Arduino MKR1000
Arduino MKR WIFI 1010
Arduino ZERO
Arduino Micro
Arduino Leonardo
Arduino Nano 33 IoT
はじめに
この例では、CAN Transmit ブロックを含む Arduino CAN Transmit モデルを使用してデータを送信します。CAN Receive ブロックを含む Arduino CAN Receive モデルを使用してデータを受信します。
前提条件
この例を開始する前に、次を行う必要があります。
必要なハードウェア
この例を実行するには、次のハードウェアが必要です。
サポートされている Arduino ボード
接続ワイヤー
OBD (オンボード診断) コネクタ
MCP2515 ベースの CAN シールド
CAN ハードウェアの構成
1. CAN シールドを Arduino ボードに接続します。
2. OBD コネクタを車両から MCP2515 ベースの CAN シールドに接続します。MCP2515 の詳細については、MCP2515 を参照してください。
サポートされている Arduino ハードウェア用の Simulink モデルの構成
1. Simulink モデルで [モデル化] タブをクリックし、[モデル設定] を選択して [コンフィギュレーション パラメーター] ダイアログ ボックスを開きます。
2. [ハードウェア実行] ペインを選択し、[ハードウェア ボード] パラメーター リストから必要な Arduino ハードウェアを選択します。その他の設定は変更しないでください。CAN プロパティの設定または変更については、Model Configuration Parameters for Simulink Support Package for Arduino Hardwareを参照してください。
3. [OK] をクリックします。
Arduino ハードウェアからのデータの送信
この例では、CAN Transmit ブロックを含む Arduino CAN Transmit モデルを使用して、Arduino ハードウェアから 1 バイトのデータを送信します。
arduino_CAN_transmit Simulink モデルを開きます。
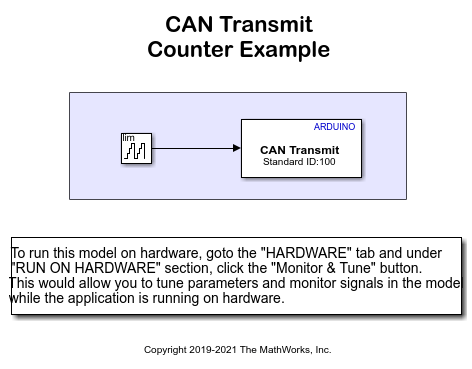
1. CAN Transmit ブロックのパラメーターを次のイメージに示すように設定します。
![]()
2. Simulink モデルで [ハードウェア] タブをクリックし、[監視と調整] をクリックしてデータを送信します。
Arduino ハードウェアでのデータの受信
この例では、CAN Receive ブロックを含む Arduino CAN Receive モデルを使用して、Arduino ハードウェアで 1 バイトのデータを受信します。
arduino_CAN_receive Simulink モデルを開きます。
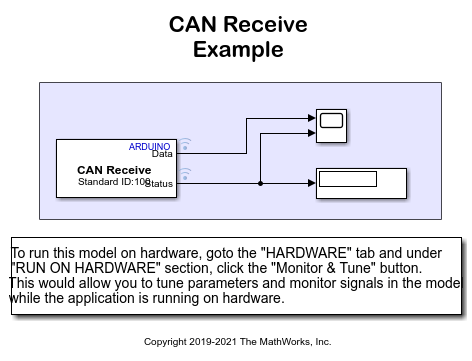
1. CAN Receive ブロックのパラメーターを次に示すように設定します。
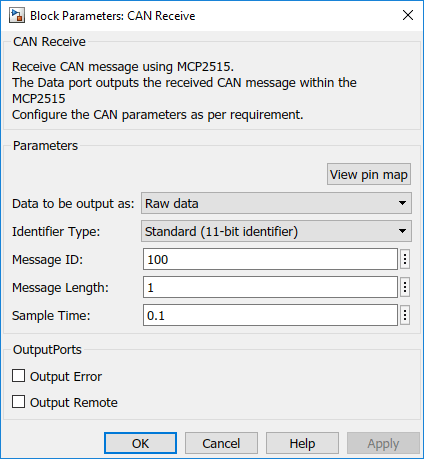
2. Simulink モデルの [ハードウェア] タブの [モード] セクションで、[ボード上で実行] を選択し、[監視と調整] をクリックしてデータを受信します。Scope ブロックに、ターゲット ハードウェアで受信したデータが表示されます。