CAN
CAN プロトコルを使用した通信
コントローラー エリア ネットワーク (CAN) は、複数のデバイス間の通信を可能にするロバストな通信プロトコルです。CAN の機能を活用して、ロバストで信頼性の高い CAN ベースの通信システムを効率的に設計して実装できます。
ブロック
| CAN Transmit | Transmit message to CAN network |
| CAN Receive | Receive message from CAN network |
| On-board CAN Receive | Receive messages using on-board Arduino CAN controller (R2024b 以降) |
| On-board CAN Transmit | Transmit messages to CAN network using on-board Arduino CAN controller (R2024b 以降) |
| Hardware Interrupt SAM | Trigger downstream function-call subsystems from interrupt service routine for Arduino SAM core (R2024b 以降) |
| Hardware Interrupt Teensy4 | Trigger downstream function-call subsystems from interrupt service routine for Teensy 4.0 and 4.1 Arduino compatible boards (R2024b 以降) |
注目の例
Transmit and Receive Data Using Arduino CAN Blocks
Use Simulink® Support Package for Arduino® Hardware to transmit and receive data from the CAN network using the specified CAN device.
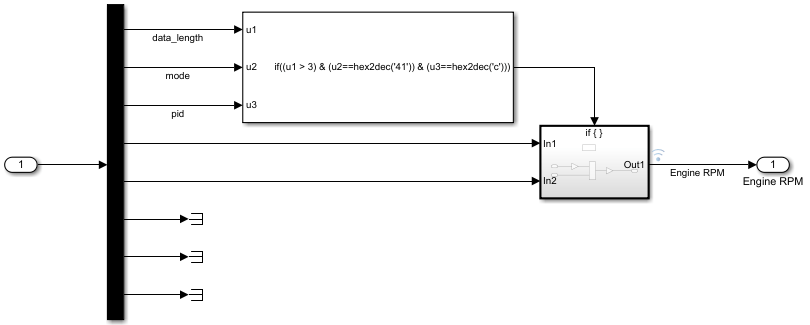
Monitor Engine RPM Using Arduino CAN Blocks
Use Simulink® Support Package for Arduino® Hardware to monitor vehicle engine RPM using Arduino CAN blocks.