フィードバック システムの出力要素の抽出
この例では、ベクトル信号を使用する状態空間システムの出力要素を抽出する方法を示します。
モデル例を開きます。
mdl = "FeedbackSystem";
open_system(mdl)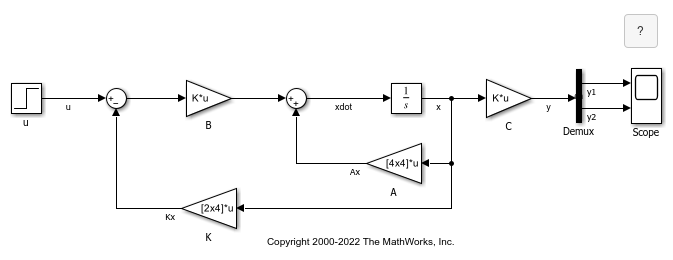
次の方程式で状態空間システムが定義されます。
システムが安定していることを確認するために、 の固有値が 、、、および と等しくなるように状態フィードバック ベクトル を選択しています。
Demux ブロックは、出力ベクトル から 2 つの要素を抽出します。その後、Scope ブロックが受信した各要素を別々にプロットします。
sim(mdl);
