Rotational Friction
回転体間の接触摩擦

ライブラリ:
Simscape /
Foundation Library /
Mechanical /
Rotational Elements
説明
Rotational Friction ブロックは、回転体間の接触摩擦を表します。次の図に示すように、摩擦トルクは相対速度の関数としてシミュレーションが行われ、ストライベック、クーロン、粘性の各成分の和であると仮定されます。
ストライベック摩擦 TS は、低速時に負の傾きになる特性があります[1]。クーロン摩擦 TC は、いずれの速度でもトルクが一定になります。粘性摩擦 TV は、相対速度に正比例するトルクで運動に抵抗します。速度ゼロの近傍でのクーロン摩擦とストライベック摩擦の和は、多くの場合、分離摩擦 Tbrk と呼ばれます。摩擦は次の方程式で近似されます。
ここで、
T は摩擦トルクです。
TC はクーロン摩擦トルクです。
Tbrk は分離摩擦トルクです。
ωbrk は分離摩擦速度です。
ωSt はストライベック速度しきい値です。
ωCoul はクーロン速度しきい値です。
ωR と ωC はそれぞれ端子 R と端子 C の絶対角速度です。
ω は相対速度です。
f は粘性摩擦係数です。
力の方程式のストライベックの部分で使用されている指数関数は連続であり、速度の振幅が分離摩擦速度より大きくなると減衰します。
力の方程式のクーロンの部分で使用されている双曲線正接関数により、ω = 0 の間は方程式が必ず滑らかな連続になりますが、非ゼロの速度ですぐに最大に達します。
このブロックの正方向は端子 R から端子 C です。つまり、端子 R の速度が端子 C の速度より大きい場合、ブロックは R から C にトルクを伝達します。
変数
シミュレーションの前にブロック変数の優先順位と初期ターゲット値を設定するには、ブロックのダイアログ ボックスまたはプロパティ インスペクターの [初期ターゲット] セクションを使用します。詳細については、ブロック変数の優先順位と初期ターゲットの設定を参照してください。
ノミナル値は、モデル内で予想される変数の大きさを指定する方法を提供します。ノミナル値に基づくシステムのスケーリングを使用すると、シミュレーションのロバスト性が向上します。ノミナル値はさまざまなソースから得られます。その 1 つがブロックのダイアログ ボックスまたはプロパティ インスペクターの [ノミナル値] セクションです。詳細については、ブロック変数のノミナル値の変更を参照してください。
例

スティックスリップ運動を伴う機械的回転システム
このモデルでは、スティックスリップ摩擦を伴う機械的回転システムについて説明します。慣性は、バネとダンパーによって、固定点に接続されます。慣性は速度源によって、スティックスリップ摩擦素子を介して駆動されます。摩擦素子では、起動摩擦とクーロン摩擦の間に差があるため、慣性のスティックスリップ運動が発生します。
端子
保存
パラメーター
分離摩擦トルク。クーロン摩擦と静止摩擦の和です。[クーロン摩擦トルク] の値以上でなければなりません。
ストライベック摩擦のピーク時の角速度。この時点のストライベック摩擦とクーロン摩擦の和が [分離摩擦トルク] になります。このパラメーターは速度しきい値を指定するものであり、シミュレーションの速度と精度のトレードオフに影響します。
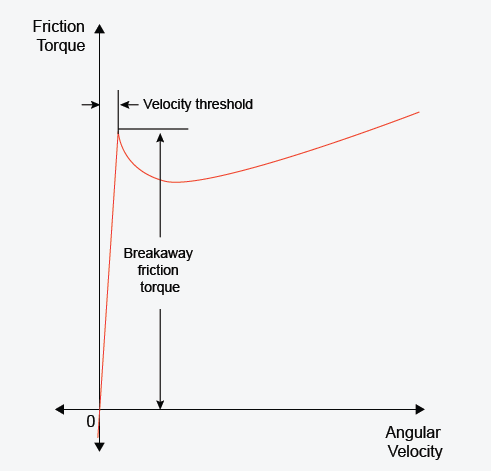
クーロン摩擦トルク。いずれの速度でも一定のトルクで回転に抵抗する摩擦です。
摩擦トルクと相対角速度の間の比例係数。このパラメーターの値はゼロ以上でなければなりません。
参照
[1] Armstrong, B. and C.C. de Wit, Friction Modeling and Compensation, The Control Handbook, CRC Press, 1995.
拡張機能
バージョン履歴
R2007a で導入