Inertia
理想的な機械回転慣性

ライブラリ:
Simscape /
Foundation Library /
Mechanical /
Rotational Elements
説明
Inertia ブロックは、次の方程式で記述される理想的な機械回転慣性を表します。
ここで、
T は慣性トルクです。
J は慣性です。
ω は角速度です。
t は時間です。
既定では、このブロックには 1 つの機械回転保存端子があります。このブロックの正方向はその端子から基準点です。つまり、慣性トルクは、慣性が正方向に加速する場合に正となります。
アプリケーションによっては、慣性をブロック線図のレイアウト内の他の要素と直列に表示することが慣用となっています。このユース ケースをサポートするため、[視覚的な端子の数] パラメーターを使用して、ブロック アイコンの反対側に 2 番目の端子を表示できます。この 2 端子バリアントは単に視覚的なものです。2 つの端子は同じ角速度のため、1 端子でも 2 端子でもブロックの機能はまったく同じです。ブロック アイコンは [視覚的な端子の数] パラメーターの値に応じて変わります。
| 視覚的な端子の数 | ブロック アイコン |
|---|---|
|
|
|
|

変数
シミュレーションの前にブロック変数の優先順位と初期ターゲット値を設定するには、ブロックのダイアログ ボックスまたはプロパティ インスペクターの [初期ターゲット] セクションを使用します。詳細については、ブロック変数の優先順位と初期ターゲットの設定を参照してください。
ノミナル値は、モデル内で予想される変数の大きさを指定する方法を提供します。ノミナル値に基づくシステムのスケーリングを使用すると、シミュレーションのロバスト性が向上します。ノミナル値はさまざまなソースから得られます。その 1 つがブロックのダイアログ ボックスまたはプロパティ インスペクターの [ノミナル値] セクションです。詳細については、ブロック変数のノミナル値の変更を参照してください。
例

永久磁石 DC モーター
この例では、テスト ハーネスおよび Simscape™ ブロックを使用して、DC モーターの無負荷速度、無負荷電流、および停動トルクのメーカー仕様を検証する方法を示します。
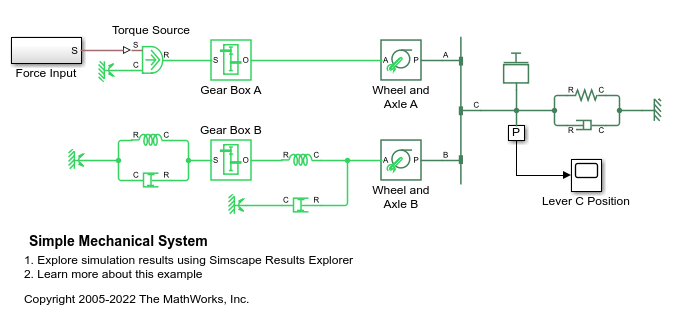
単純な機械システム
この例では、回転運動と並進運動を接続するシステムのモデルを説明します。加算てこが駆動する負荷は、質量、粘性摩擦、およびジョイント C に接続するバネで構成されています。ジョイント B は、ホイールおよび軸とギア ボックスを経由する基準点に接続する 2 つの回転バネに吊り下げられています。ジョイント A は、ギア ボックスとホイールおよび軸機構を経由してトルク源に接続されています。
端子
保存
パラメーター
拡張機能
バージョン履歴
R2007a で導入