ROS 2 ネットワーク アナライザー
説明
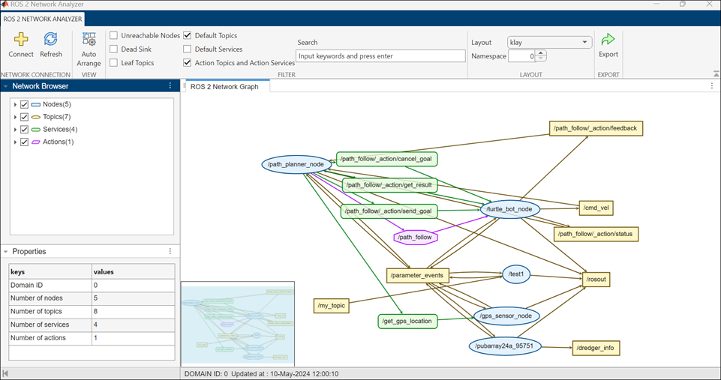
ROS 2 ネットワーク アナライザーでは、ROS 2 ネットワークの全体的な概要を可視化し、ネットワーク グラフ内のすべての要素に関する基本情報 (ノード名など)、ノード間のメッセージに関する情報、および ROS 2 ノードに関連付けられたパラメーター間の相互作用 (トピック、サービス、アクションなど) を解析できます。
次のイメージは、アプリのツールストリップの表示を示しています。
このアプリの使い方は次のとおりです。
MATLAB® ツールストリップの [アプリ] タブから ROS 2 ネットワーク アナライザー アプリを開きます。
MATLAB ツールストリップから [接続]
 をクリックして ROS 2 ネットワークに接続します。
をクリックして ROS 2 ネットワークに接続します。ROS 2 ドメイン ID を指定し、[送信] をクリックします。既定のドメイン ID は 0 です。これにより、ビジュアライザーでネットワーク グラフが開きます。
各種要素のリストを [ネットワーク ブラウザー] パネルで確認します。それらの数については、接続している ROS 2 ネットワークのドメイン ID と共に [プロパティ] パネルで確認できます。[ネットワーク ブラウザー] でいずれかの要素を選択または選択解除すると、グラフでその要素の表示と非表示が切り替わります。
ネットワーク ブラウザー プロパティ 
ノード — 接続している ROS 2 ネットワーク内のすべてのノードがリストされます。
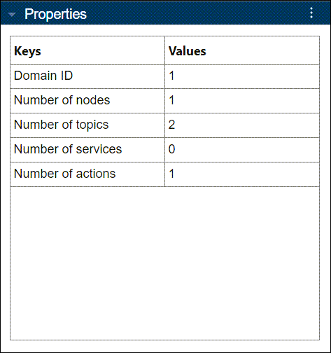

トピック — 接続している ROS 2 ネットワーク内の各ノードでパブリッシュされるトピックとサブスクライブされるトピックがすべてリストされます。

サービス — ノードが提供元 (サービスサーバー) であるサービスとノードがクライアント (サービスクライアント) であるサービスがすべてリストされます。

アクション — ノードが提供元 (アクションサーバー) であるアクションとノードがクライアント (アクションクライアント) であるアクションがすべてリストされます。
読み込まれている ROS 2 ネットワークの [ネットワーク ブラウザー] で、選択したエンティティに関連するノード、トピック、サービス、アクションに効率的にフィルターを適用するには、[高度なフィルター] オプションを利用します。それらの完全な名前を入力する必要はありません。メッセージ、サービス、アクションのインターフェイス タイプに基づいてフィルターを適用することもできます。
次のいずれかの表現を [検索] タブで入力することで、要件に合わせてネットワークをさらにフィルターして絞り込むことができます。
キーワード — 特定の単語 (camera や GPS など) を含むエンティティを含めます。
正規表現 — パターン (
.*camera.*、gps.*など) を使用してエンティティを一致させ、柔軟な検索を行います。除外 — キーワードの前に ~ を使用すると (
~debugや~cameraなど)、エンティティが除外されます。複数入力 — 複数のフィルターは、コンマで区切って入力します。
ネットワークのキャンバスで [フィルターのクリア] をクリックすると、高度なフィルターがすべて削除され、既定のグラフが再読み込みされます。
[ネットワークの深さ] オプションに値を追加して、選択したエンティティに対してグラフで表示される隣接エンティティの数を変更することもできます。
新たに追加または削除されたノードと [ネットワーク ブラウザー] および [プロパティ] のすべてのノード要素のそれぞれで ROS 2 ネットワーク グラフを更新するには、[リフレッシュ]
 をクリックします。
をクリックします。要件に基づいて、可視化ウィンドウ内で任意の要素をクリックしてドラッグできます。ネットワーク グラフを初期表示に戻すには、アプリのツールストリップから [自動調整]
 をクリックします。
をクリックします。ピンチ操作を使用してズームインやズームアウトを行うか、クリックして押したまま、視覚的要件に基づいてグラフをパンします。
大規模なネットワークの全体の概要を確認するには、可視化ウィンドウの左下隅にあるミニ マップを使用します。現在表示されているセクションが強調表示されます。ミニ マップで任意の位置をクリックしてネットワーク グラフをパンできるため、ナビゲーションが簡単であり、必要なセクションを表示するように選択できます。
グラフでいずれかの要素を選択すると、そのすべての詳細が [プロパティ] パネルに表示されます。
グラフでそれぞれの要素の表示と非表示を切り替えるには、各種の検索フィルターを使用します。
さまざまなレイアウトを使用して特定の要件に基づいてネットワーク グラフを調整するか、名前空間に基づいて要素をグループ化します。
グラフのスナップショットをイメージとしてエクスポートするには、MATLAB ツールストリップから [エクスポート]
 をクリックします。
をクリックします。
ROS 2 ネットワーク アナライザー アプリを開く
MATLAB ツールストリップ: [アプリ] タブの [ロボティクスと自律システム] にあるアプリ アイコン
 をクリックします。
をクリックします。MATLAB コマンド プロンプト: 「
ros2NetworkAnalyzer」と入力します。