MATLAB および Simulink によるアクターのシミュレーション
RoadRunner Scenario では MATLAB および Simulink を使用したシミュレーションがサポートされています。RoadRunner Scenario シミュレーション ワークフローでは、以下が行われます。
Simulink および MATLAB System object™ の動作を生成する。
RoadRunner Scenario でアクターに動作を関連付け、パラメーターを調整し、シナリオをシミュレーションして動作を観察する。
Simulink および MATLAB System object の動作を proto ファイルまたはパッケージとしてパブリッシュする。
シミュレーションの構成
トピック
- Overview of Simulating RoadRunner Scenarios with MATLAB and Simulink (Automated Driving Toolbox)
This topic describes workflows to create actor behaviors in MATLAB or Simulink, associate the behaviors with graphical actors in RoadRunner Scenario, start the scenario simulation in RoadRunner, and log simulation results for further analysis.
- アクターの動作の指定と割り当て
RoadRunner、MATLAB および Simulink、または CARLA などの外部シミュレーターのアクターに動作を割り当てます。
- Design Vehicle Following User-Defined Actions Scenario
Design a scenario where vehicle behavior using user-defined actions is processed in MATLAB and Simulink.
- Design Vehicle Following User-Defined Events Scenario
Design a scenario where vehicle behavior reading and writing user-defined events is created in MATLAB and Simulink.
- Add Sensors to RoadRunner Scenario Using MATLAB (Automated Driving Toolbox)
Simulate a RoadRunner Scenario with sensor models defined in MATLAB and visualize object and lane detections.
- Simulink を使用した RoadRunner シナリオへのセンサーの追加 (Automated Driving Toolbox)
Simulink で定義されたセンサー モデルをもつ RoadRunner シナリオのシミュレーションを実行し、オブジェクト検出と車線検出を可視化する。
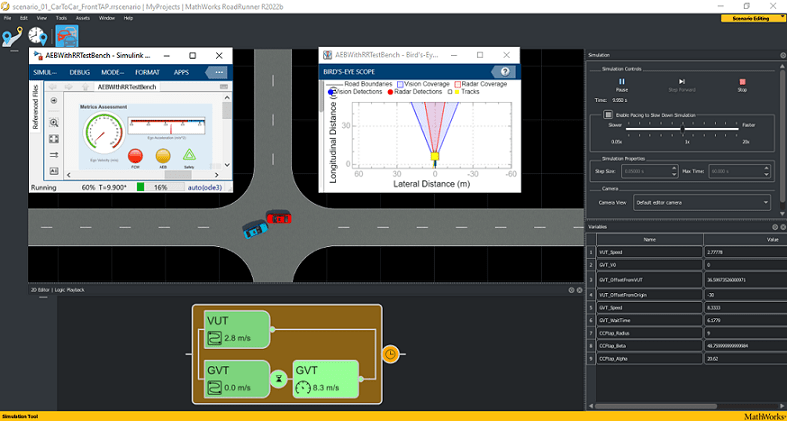
- Generate RoadRunner Scenario Using Tabular Data for AEB Car-to-Car Testing (Automated Driving Toolbox)
Generate RoadRunner scenario using tabular data for AEB car-to-car testing. (R2024a 以降)
- Publish Ground Truth and Sensor Data from RoadRunner Scenario to ROS 2 Network (ROS Toolbox)
Publish ground-truth and sensor data from a RoadRunner scenario to ROS 2 network and visualize it using ROS Data Analyzer app. (R2025a 以降)
注目の例
Speed Action Follower with RoadRunner Scenario
Design a speed action following actor behavior using MATLAB and cosimulate with RoadRunner Scenario.

Trajectory Follower with RoadRunner Scenario
Cosimulate RoadRunner Scenario with Simulink to control the speed of trajectory following vehicle in RoadRunner Scenario.
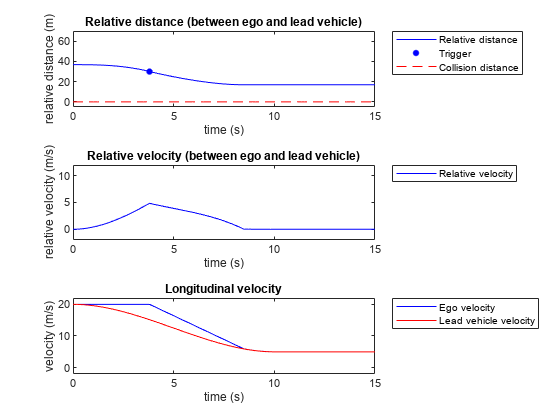
Autonomous Emergency Braking with RoadRunner Scenario
Simulate autonomous emergency braking (AEB) system, designed in Simulink, with RoadRunner Scenario.

Autonomous Emergency Braking with High-Fidelity Vehicle Dynamics
Design autonomous emergency braking system with 14DOF vehicle dynamics in Simulink and cosimulate with RoadRunner Scenario.

Highway Lane Change Planner with RoadRunner Scenario
Simulate a highway lane change planner, designed in Simulink, with RoadRunner Scenario.

Truck Platooning with RoadRunner Scenario
Simulate truck platooning application, designed in Simulink, with RoadRunner Scenario.

Lane-Keeping System for Self-Driving Trucks
Design a lane-keeping system for self-driving trucks in Simulink and simulate it with RoadRunner Scenario.

Lane-Level Path Planning with RoadRunner Scenario
Design a lane-level path planner in MATLAB and cosimulate with RoadRunner Scenario.

Lateral Offset Follower with High-Fidelity Vehicle Dynamics
Simulate a lateral offset action follower, designed in Simulink, with RoadRunner Scenario.
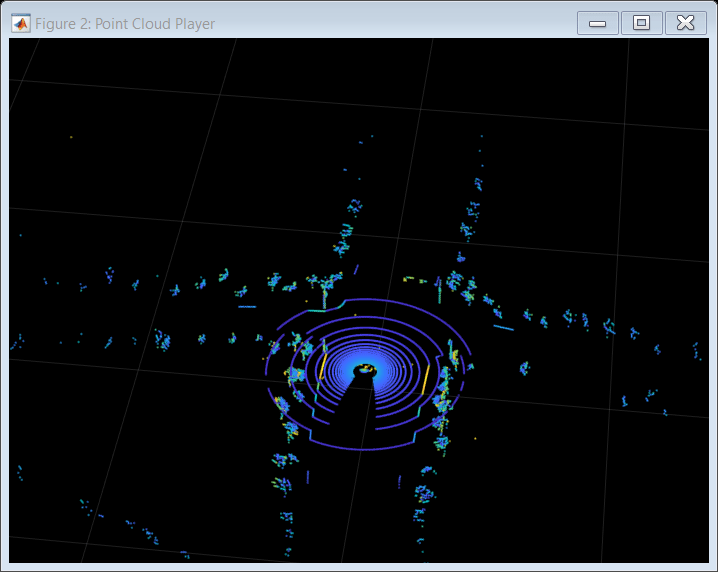
Add Lidar Sensor Model with Simulated Weather Effects to RoadRunner Scenario
Integrate a lidar sensor model into RoadRunner Scenario, generate lidar point cloud data in foggy weather conditions, and export lidar sensor simulation data to a rosbag file.

Integrate Lidar Sensor Model into RoadRunner Scenario and Cosimulate with Unreal Engine
Integrate lidar sensor model with RoadRunner Scenario using Simulink and cosimulate with Unreal Engine®.

Traffic Signal Follower with RoadRunner Scenario
Design a traffic signal follower in Simulink and cosimulate it with RoadRunner Scenario.

Generate RoadRunner Scenario from Recorded Sensor Data
Generate RoadRunner Scenario from recorded GPS data and preprocessed actor track list.
Ego Vehicle Localization Using GPS and IMU Fusion for Scenario Generation
Localize ego vehicle by fusing GPS and IMU sensor data to generate virtual driving scenario.
Ego Localization Using Lane Detections and HD Map for Scenario Generation
Perform lane-level localization of ego vehicle using lane detections, HD map data, and GPS data.
Simulate RoadRunner Scenario with Custom 3D Assets Generated from Single-View Camera Images
Simulate RoadRunner scenario with assets from camera images.

Generate RoadRunner Scenario Variants by Modifying Actor Assets
Generate scenario variants from seed scenario by modifying actor dimensions.

Highway Lane Following with RoadRunner Scenario
Simulate highway lane following application, designed in Simulink, with RoadRunner Scenario.

Intersection Collision Warning Using V2X Communication
Design a vehicle-to-everything (V2X) communication-based intersection collision warning system in Simulink and cosimulate it with RoadRunner Scenario.