radarScenario
レーダー シナリオの作成
説明
radarScenario はレーダー シナリオ オブジェクトを作成します。レーダー シナリオは、複数のプラットフォームを含む 3 次元環境をシミュレーションします。プラットフォームは、航空機、地上車両、船舶など、シミュレーションするオブジェクトを表します。一部のプラットフォームには、レーダー、ソナー、赤外線などのセンサーが搭載されています。その他のプラットフォームは、信号のソースまたは信号の反射体として機能します。
追加するプラットフォームごとに platform 関数を呼び出して、レーダー シナリオを入力します。platform 関数を呼び出すときに 'Dimension' プロパティを指定することにより、プラットフォームを点または直方体としてモデル化できます。プラットフォームには、レーダー センサーのレーダー断面積など、センサーの種類に固有のプロパティをもつシグネチャがあります。kinematicTrajectory、waypointTrajectory、または geoTrajectory の各 System object™ を使用して、任意のプラットフォームの軌跡を作成できます。
必要なプラットフォームをすべて追加したら、ループ内で advance 関数を使用して、シナリオを増分タイム ステップでシミュレーションできます。record 関数を使用して、すべてのシミュレーションを一度に実行できます。
作成
構文
説明
scene = radarScenarioscene を作成します。kinematicTrajectory または waypointTrajectory の各 System object を使用して、シナリオ内のプラットフォームの軌跡を直交座標系状態量として指定できます。
scene = radarScenario('IsEarthCentered',true)true に設定します。geoTrajectory System object を使用して、シナリオ内のプラットフォームの軌跡を測地系状態量として指定できます。
プロパティ
オブジェクト関数
platform | Add platform to radar scenario |
landSurface | Add land surface to radar scenario |
seaSurface | Add sea surface to radar scenario |
customSurface | Add custom surface with complex scattering to a radar scenario |
advance | Advance radar scenario simulation by one time step |
atmosphere | Add atmosphere model object to radar scenario |
restart | Restart simulation of radar scenario |
record | Record simulation of radar scenario |
emit | Collect emissions from all emitters in radar scenario |
propagate | Propagate emissions in radar scenario |
detect | Collect detections from all sensors in radar scenario |
receive | シナリオ内のレーダーからの IQ 信号の受信 |
clutterGenerator | Add clutter generator for radar |
platformProfiles | Profiles of radar scenario platforms |
platformPoses | Position information for each platform in radar scenario |
coverageConfig | Sensor and emitter coverage configuration |
perturb | Apply perturbations to radar scenario |
clone | Create copy of radar scenario |
例
異なる軌跡をたどる 2 つのプラットフォームを使用してレーダー シナリオを作成します。
sc = radarScenario('UpdateRate',100,'StopTime',1.2);
2 つのプラットフォームを作成します。
platfm1 = platform(sc); platfm2 = platform(sc);
プラットフォーム 1 は、半径 10 m の円形パスを 1 秒間たどります。これは、ウェイポイントを円形に配置し、最初のウェイポイントと最後のウェイポイントが同一であるようにすることで実現されます。
wpts1 = [0 10 0; 10 0 0; 0 -10 0; -10 0 0; 0 10 0]; time1 = [0; 0.25; .5; .75; 1.0]; platfm1.Trajectory = waypointTrajectory(wpts1,time1);
プラットフォーム 2 は 1 秒間直線パスをたどります。
wpts2 = [-8 -8 0; 10 10 0]; time2 = [0; 1.0]; platfm2.Trajectory = waypointTrajectory(wpts2,time2);
シナリオ内のプラットフォームの数を確認します。
disp(sc.Platforms)
{1×1 radar.scenario.Platform} {1×1 radar.scenario.Platform}
シミュレーションを実行し、アニメーションの線を使用して各プラットフォームの現在の位置をプロットします。
figure grid axis equal axis([-12 12 -12 12]) line1 = animatedline('DisplayName','Trajectory 1','Color','b','Marker','.'); line2 = animatedline('DisplayName','Trajectory 2','Color','r','Marker','.'); title('Trajectories') p1 = pose(platfm1); p2 = pose(platfm2); addpoints(line1,p1.Position(1),p1.Position(2)); addpoints(line2,p2.Position(2),p2.Position(2)); while advance(sc) p1 = pose(platfm1); p2 = pose(platfm2); addpoints(line1,p1.Position(1),p1.Position(2)); addpoints(line2,p2.Position(2),p2.Position(2)); pause(0.1) end

両方のプラットフォームのウェイポイントをプロットします。
hold on plot(wpts1(:,1),wpts1(:,2),' ob') text(wpts1(:,1),wpts1(:,2),"t = " + string(time1),'HorizontalAlignment','left','VerticalAlignment','bottom') plot(wpts2(:,1),wpts2(:,2),' or') text(wpts2(:,1),wpts2(:,2),"t = " + string(time2),'HorizontalAlignment','left','VerticalAlignment','bottom') hold off

地球中心のレーダー シナリオを作成し、更新レートを指定します。
scene = radarScenario('IsEarthCentered',true,'UpdateRate',0.01);
シナリオに飛行機を表すプラットフォームを追加します。飛行機の軌跡は経度と高度によって変化します。測地経緯度を使用して軌跡を指定します。
geoTraj = geoTrajectory([42.300,-71.351,10600;42.300,-124.411,0],[0 21600]);
plane = platform(scene,'Trajectory',geoTraj);レーダー シナリオを進め、飛行機ターゲットの測地位置と直交座標位置を記録します。
positions = []; while advance(scene) poseLLA = pose(plane,'CoordinateSystem','Geodetic'); poseXYZ = pose(plane,'CoordinateSystem','Cartesian'); positions = [positions;poseXYZ.Position];%#ok<AGROW> Allow the buffer to grow. end
距離の単位をメートルからキロメートルに変換します。
km = 1000; positions = positions/km;
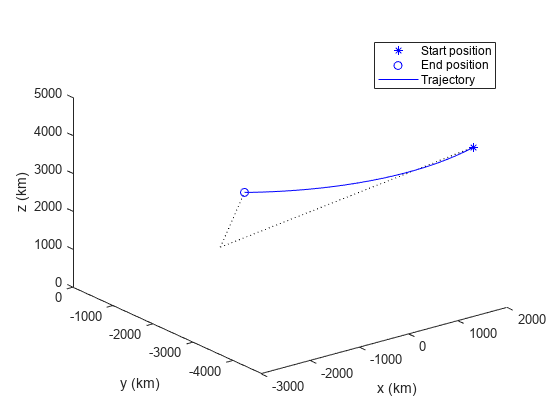
ECEF 座標系で開始位置、終了位置、軌跡を可視化します。
hold on plot3(positions(1,1),positions(1,2),positions(1,3),'b*') plot3(positions(end,1),positions(end,2),positions(end,3),'bo') plot3(positions(:,1),positions(:,2),positions(:,3),'b')
開始位置と終了位置の地球半径線をプロットします。
plot3([0 positions(1,1)],[0 positions(1,2)],[0 positions(1,3)],'k:') plot3([0 positions(end,1)],[0 positions(end,2)],[0 positions(end,3)],'k:') xlabel('x (km)') ylabel('y (km)') zlabel('z (km)') legend('Start position','End position','Trajectory') view(3)
バージョン履歴
R2021a で導入