bistaticConstantSNR
構文
説明
bistaticConstantSNR を使用して、カッシーニの卵形線またはカッシーニの曲面とも呼ばれる、バイスタティック定数 SNR (S/N 比) の等高線または表面を作成およびプロットし、オプションで出力します。モノスタティック レーダーとは異なり、バイスタティック レーダー システムでは、送信機要素と受信機要素が同じ場所ではなく別々の場所にあります。bistaticConstantSNR 関数は、バイスタティック送信機および受信機が同期されていると仮定します。
例
この例では、バイスタティック レーダーの定数 SNR 等高線 (カッシーニの卵形線) をプロットし、バイスタティック レーダー定数 K を計算する方法を示します。
バイスタティック レーダー定数 (K) の計算および定数 SNR 等高線のプロット
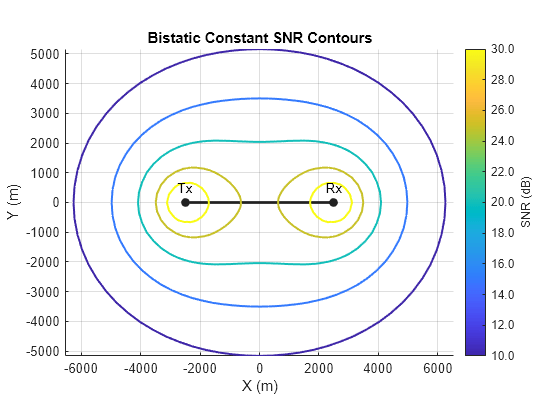
周波数 5.6 GHz、ピーク電力 1.5 MW で動作するバイスタティック レーダーについて、カッシーニの卵形線をプロットします。送信機と受信機は 5 km 離れています。バイスタティック ターゲットのレーダー断面積 (RCS) が 0.1 で、パルス幅が 0.2 マイクロ秒の矩形波であると仮定します。送信機のゲインは 20 dB、受信機のゲインは 10 dB です。システム損失はないものと仮定します。
% Inputs freq = 5.6e9; % Radar operating frequency (Hz) lambda = freq2wavelen(freq); % Wavelength (m) Pt = 1.5e6; % Peak power (W) tau = 0.2e-6; % Pulse width (s) sigma = 0.1; % Bistatic radar cross section (m^2) Gtx = 20; % Transmitter gain (dB) Grx = 10; % Receiver gain (dB) txpos = [-2.5e3 0]; % Transmitter position (m) rxpos = [2.5e3 0]; % Receiver position (m) % Calculate bistatic radar constant K (dB) K = radareqsnr(lambda,1,Pt,tau,rcs=sigma,gain=[Gtx Grx]); % Plot bistatic constant SNR contours bistaticConstantSNR(txpos,rxpos,K)
この例では、指定された SNR 値でバイスタティック レーダーの定数 SNR 等高線 (カッシーニの卵形線) をプロットする方法を示します。送信機中心と受信機中心の動作領域を示す尖点を含めます。
定数 SNR 等高線のプロット
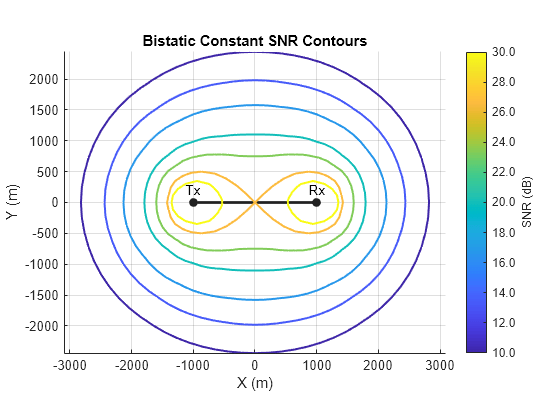
で与えられるバイスタティック レーダー定数 K をもつバイスタティック レーダーについて、カッシーニの卵形線をプロットします。ここで、L は送信機と受信機の間の距離です。SNR が [10 13 16 20 23 30] の等高線をプロットし、尖点を含めます。
% Inputs txpos = [-1e3 0]; % Transmitter position (m) rxpos = [1e3 0]; % Receiver position (m) L = norm(txpos - rxpos); % Baseline distance (m) K = pow2db(30*L^4); % Bistatic radar constant K (dB) SNRs = [10 13 16 20 23 30]; % SNRs (dB) % Plot bistatic constant SNR contours bistaticConstantSNR(txpos,rxpos,K,SNR=SNRs,IncludeCusp=true)
この例では、指定した方位角と仰角におけるバイスタティック レーダーの定数 SNR 表面 (カッシーニの曲面) をプロットする方法を示します。
定数 SNR 表面のプロット
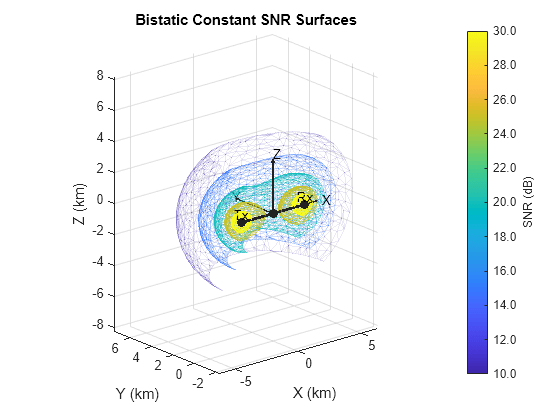
周波数 5.6 GHz、ピーク電力 1.5 MW で動作するバイスタティック レーダーについて、カッシーニの曲面をプロットします。プロットを方位角 0 ~ 180 度、仰角 -45 ~ 45 度に制限し、km 単位でプロットします。送信機と受信機は 5 km 離れています。バイスタティック ターゲットの RCS が 0.1 で、パルス幅が 0.2 マイクロ秒の矩形波であると仮定します。送信機のゲインは 20 dB、受信機のゲインは 10 dB です。システム損失はないものと仮定します。
% Inputs freq = 5.6e9; % Radar operating frequency (Hz) lambda = freq2wavelen(freq); % Wavelength (m) Pt = 1.5e6; % Peak power (W) tau = 0.2e-6; % Pulse width (s) sigma = 0.1; % Bistatic radar cross section (m^2) Gtx = 20; % Transmitter gain (dB) Grx = 10; % Receiver gain (dB) txpos = [-2.5e3 0 0]; % Transmitter position (m) rxpos = [2.5e3 0 0]; % Receiver position (m) % Calculate bistatic radar constant K (dB) K = radareqsnr(lambda,1,Pt,tau,rcs=sigma,gain=[Gtx Grx]); % Plot bistatic constant SNR surfaces bistaticConstantSNR(txpos,rxpos,K, ... PlotUnits="km",AzimuthLimits=[0 180],ElevationLimits=[-45 45], ... ShowLocalCoordinates=true) view([-40 20])
この例では、指定された SNR 値でバイスタティック レーダーの定数 SNR 等高線データを出力し、手動でプロットする方法を示します。
定数 SNR 等高線の計算
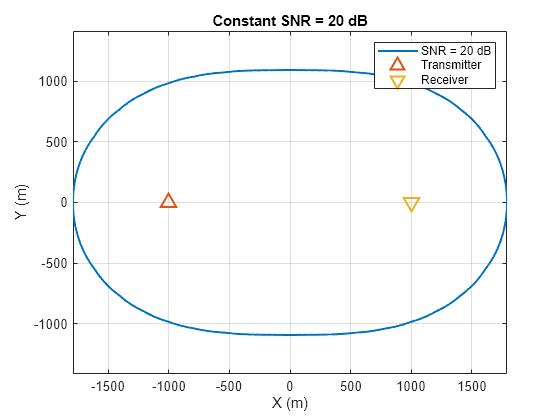
で与えられるバイスタティック レーダー定数 K をもつバイスタティック レーダーについて、SNR が 20 dB である場合のカッシーニの卵形線を計算します。ここで、L は送信機と受信機の間の距離です。結果を手動でプロットします。
% Inputs txpos = [-1e3 0]; % Transmitter position (m) rxpos = [1e3 0]; % Receiver position (m) L = norm(txpos - rxpos); % Baseline distance (m) K = pow2db(30*L^4); % Bistatic radar constant K (dB) % Calculate bistatic constant SNR contour M = bistaticConstantSNR(txpos,rxpos,K,SNR=20,NumSamples=1e3)
M = struct with fields:
X: [-1.7892e+03 -1.7892e+03 -1.7890e+03 -1.7886e+03 -1.7882e+03 -1.7876e+03 -1.7869e+03 -1.7861e+03 -1.7852e+03 -1.7841e+03 -1.7829e+03 -1.7816e+03 -1.7801e+03 -1.7785e+03 -1.7768e+03 -1.7749e+03 -1.7730e+03 -1.7709e+03 … ] (1×1028 double)
Y: [-2.1912e-13 -11.2530 -22.5045 -33.7530 -44.9970 -56.2350 -67.4655 -78.6870 -89.8980 -101.0970 -112.2823 -123.4525 -134.6060 -145.7412 -156.8565 -167.9503 -179.0210 -190.0669 -201.0865 -212.0779 -223.0396 -233.9698 -244.8667 … ] (1×1028 double)
SNR: 20
% Plot figure plot(M.X,M.Y,'LineWidth',1.5) hold on plot(txpos(1),txpos(2),'^','LineWidth',1.5,'MarkerSize',10) plot(rxpos(1),rxpos(2),'v','LineWidth',1.5,'MarkerSize',10) grid on axis equal xlabel('X (m)') ylabel('Y (m)') legend('SNR = 20 dB','Transmitter','Receiver') title('Constant SNR = 20 dB')
入力引数
名前と値の引数
出力引数
詳細
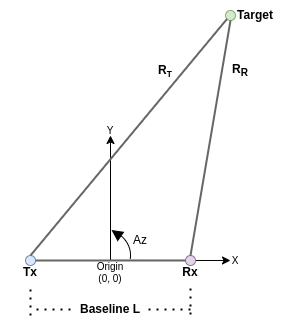
下のイメージは、2 次元の場合のバイスタティック ジオメトリを示しています。送信機サイトと受信機サイトは x 軸に沿って配置されます。bistaticConstantSNR 関数において、正の x 軸は txpos から rxpos を指す単位ベクトルです。ベースライン L、つまり直接パスは、送信機 Tx と受信機 Rx の間のラインとして定義されます。送信機からターゲットまでのラインはレンジ RT であり、受信機からターゲットまでのレンジはレンジ RR です。方位角は、x-y 平面内で正の x 軸から反時計回りに測定された度単位での角度です。以下に示すように、ローカル座標系の原点は、バイスタティック ベースライン L の中心点です。
カッシーニの卵形線は、三角形の頂点の隣辺の積が一定かつ対辺の長さが固定である場合の、三角形の頂点の軌跡です [1]。バイスタティックの場合、頂点がターゲットになります。頂点の隣辺は RT と RR です。ベースライン L は固定された対辺となります。カッシーニのバイスタティック卵形線は、任意のバイスタティック平面における定数 S/N 比 (SNR) の等高線です。
SNR = K / (RT2RR2),
ここで、K はバイスタティック レーダー定数です。
参照
[1] Willis, Nicholas J. Bistatic Radar. Raleigh, NC: SciTech Publishing, Inc., 2005.
バージョン履歴
R2024b で導入