shnidman
Required SNR using Shnidman’s equation
Description
SNR = shnidman(Pd,Pfa)
Examples
Find and compare the required single-pulse SNR for Swerling cases I and III. The Swerling case I has no dominant scatterer while the Swerling case III has a dominant scatterer.
Specify the false-alarm and detection probabilities.
pfa = 1e-6:1e-5:.001; Pd = 0.9;
Allocate arrays for plotting.
SNR_Sw1 = zeros(1,length(pfa)); SNR_Sw3 = zeros(1,length(pfa));
Loop over PFAs for both scatterer cases.
for j=1:length(pfa) SNR_Sw1(j) = shnidman(Pd,pfa(j),1,1); SNR_Sw3(j) = shnidman(Pd,pfa(j),1,3); end
Plot the SNR vs PFA.
semilogx(pfa,SNR_Sw1) hold on semilogx(pfa,SNR_Sw3) hold off xlabel("False-Alarm Probability") ylabel("SNR") title("Required Single-Pulse SNR for Pd = "+Pd) legend("Swerling Case "+["I" "III"],Location="southwest")
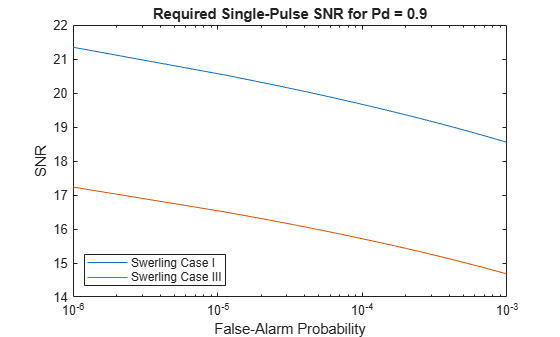
The presence of a dominant scatterer reduces the required SNR for the specified detection and false-alarm probabilities.
Input Arguments
More About
Extended Capabilities
Version History
Introduced in R2011a