rotz
z 軸を中心とする回転のための回転行列
説明
例
入力引数
出力引数
詳細
回転行列はベクトルを新しい方向に回転させるために使用されます。
3 次元空間でベクトルを変換する場合、回転行列がよく使用されます。回転行列には、ベクトルを新しい位置に回転させる場合と、座標基底 (または座標系) を新しい位置に回転させる場合の 2 つの用途があります。この場合、ベクトルは変更されませんが、新しい基底におけるその成分は元の基底における成分とは異なります。ユークリッド空間には、x 軸、y 軸、z 軸のそれぞれを中心とした 3 つの基本的な回転があります。各回転は回転角度によって指定します。回転角度は、回転軸方向 (原点方向) を見ている観測者から見た場合、反時計回りの回転に対して正であると定義されます。任意の回転は、これら 3 つの組み合わせで構成できます (オイラーの回転定理)。たとえば、3 つの回転から成るシーケンス を使用して、ベクトルを任意の方向に回転させることができます。
x、y、z 軸を中心にベクトルを回転させる回転行列は次のように表されます。
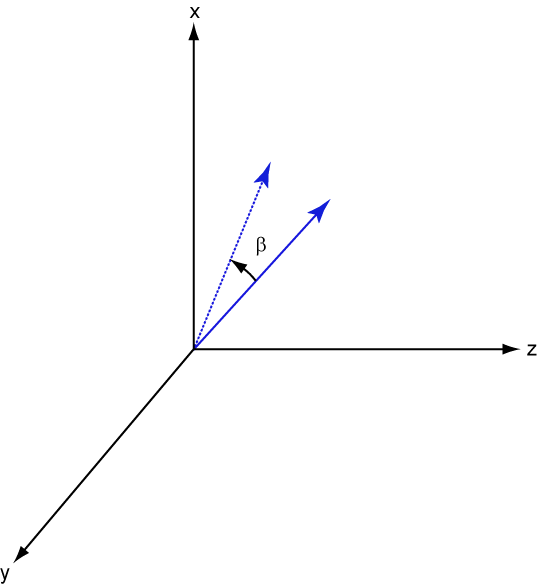
x 軸を中心とした反時計回りの回転
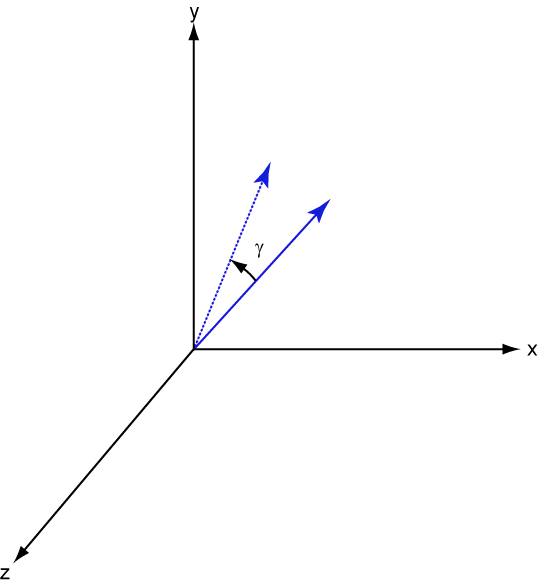
y 軸を中心とした反時計回りの回転
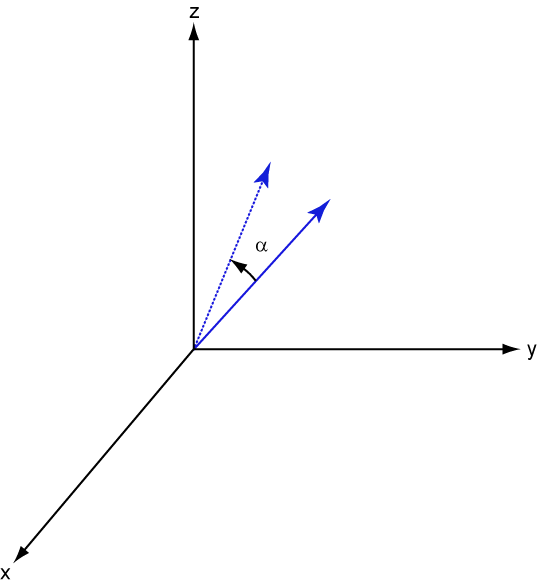
z 軸を中心とした反時計回りの回転
次の 3 つの図は、各回転軸における正回転の様子を示しています。
どのような回転に対しても、 を満たす逆回転が存在します。たとえば、x 軸回転行列の逆行列は、次のように角度の符号を変更することによって得られます。
この例は、逆回転行列が元の行列の転置であるという基本的な特性を示しています。回転行列は A’A = 1 を満たすので、det(A) = 1 となります。回転において、ベクトルの長さとベクトル間の角度は保持されます。
回転について、別の方法で考えることもできます。元の基底ベクトル集合 について考え、回転行列 A を使用してそれらすべてを回転させるとします。これにより、新しい基底ベクトル集合 が生成されます。これは、元のベクトルと次のように関連しています。
転置を使用して、新しい基底ベクトルを古い基底ベクトルの線形結合として次のように記述できます。
これで、任意のベクトルを、いずれかの基底ベクトル集合の線形結合として記述できるようになりました。
代数操作を使用して、基底 (または座標系) が回転するときの固定ベクトルの成分の変換を導出できます。この変換では、回転行列の転置を使用します。
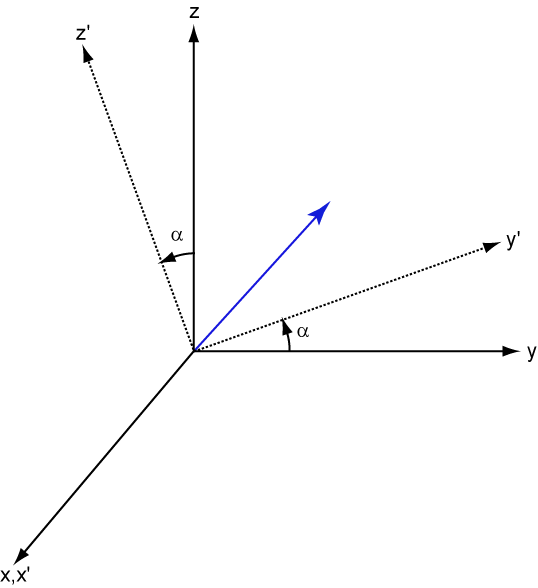
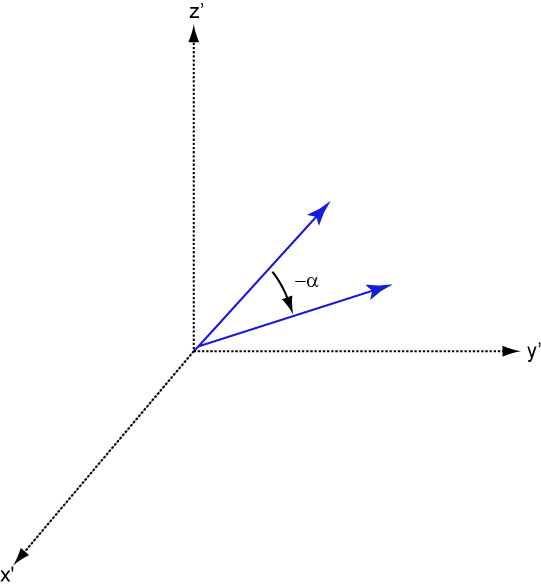
次の図は、座標系が x 軸を中心に回転するときにベクトルがどのように変換されるかを示しています。次の図は、この変換が "ベクトルの" 反対方向への回転として解釈できることを示しています。
参照
[1] Goldstein, H., C. Poole and J. Safko, Classical Mechanics, 3rd Edition, San Francisco: Addison Wesley, 2002, pp. 142–144.
拡張機能
バージョン履歴
R2013a で導入