step
System object: phased.FreeSpace
Namespace: phased
Propagate signal from one location to another
Syntax
Y = step(SFS,F,origin_pos,dest_pos,origin_vel,dest_vel)
Description
Note
Starting in R2016b, instead of using the step method
to perform the operation defined by the System object™, you can
call the object with arguments, as if it were a function. For example, y
= step(obj,x) and y = obj(x) perform
equivalent operations.
Y = step(SFS,F,origin_pos,dest_pos,origin_vel,dest_vel)Y when the narrowband signal F propagates
in free space from the position or positions specified in origin_pos to
the position or positions specified in dest_pos.
For non-polarized signals, either the origin_pos or dest_pos arguments
can specify more than one point. Using both arguments to specify multiple
points is not allowed. The velocity of the signal origin is specified
in origin_vel and the velocity of the signal
destination is specified in dest_vel. The dimensions
of origin_vel and dest_vel must
agree with the dimensions of origin_pos and dest_pos,
respectively.
Note
The object performs an initialization the first time the object is executed. This
initialization locks nontunable properties
and input specifications, such as dimensions, complexity, and data type of the input data.
If you change a nontunable property or an input specification, the System object issues an error. To change nontunable properties or inputs, you must first
call the release method to unlock the object.
Input Arguments
Output Arguments
| Propagated signal, returned as a M-element complex-valued column vector, M-by-N complex-valued matrix or MATLAB structure containing complex-valued fields. If If The output |
Examples
Calculate the amplitude of a signal propagating in free space from a radar at (40000,0,0) to a target at (300,200,50). Assume both the radar and the target are stationary. The sample rate is 8000 Hz while the operating frequency of the radar is 300 MHz. Transmit five samples of a unit amplitude signal. The signal propagation speed takes the default value of the speed of light. Examine the amplitude of the signal at the target.
fs = 8e3;
fop = 3e8;
freesp = phased.FreeSpace(SampleRate=fs, ...
OperatingFrequency=fop);
pos1 = [40000;0;0];
pos2 = [300;200;50];
vel1 = [0;0;0];
vel2 = [0;0;0];Create the transmitted signal.
x = ones(5,1);
Find the received signal at the target.
y = freesp(x,pos1,pos2,vel1,vel2); disp(y)
1.0e-05 * 0.0000 + 0.0000i 0.1870 - 0.0229i 0.1988 - 0.0243i 0.1988 - 0.0243i 0.1988 - 0.0243i
The first sample is zero because the signal has not yet reached the target.
Manually compute the loss using the formula
R = sqrt((pos1-pos2)'*(pos1-pos2));
lambda = physconst('Lightspeed')/fop;
L = (4*pi*R/lambda)^2L = 2.4924e+11
Because the transmitted amplitude is unity, the magnitude-squared value of the signal at the target for the third sample equals the inverse of the loss.
disp(1/abs(y(3))^2)
2.4924e+11
Calculate the result of propagating a signal in free space from a radar at (1000,0,0) to a target at (300,200,50). Assume the radar moves at 10 m/s along the x-axis, while the target moves at 15 m/s along the y-axis. The sample rate is 8000 Hz while the operating frequency of the radar is 300 MHz. The signal propagation speed takes the default value of the speed of light. Transmit five samples of a unit amplitude signal and examine the amplitude of the signal at the target.
fs = 8000;
fop = 3e8;
freesp = phased.FreeSpace(SampleRate=fs, ...
OperatingFrequency=fop);
pos1 = [1000;0;0];
pos2 = [300;200;50];
vel1 = [10;0;0];
vel2 = [0;15;0];
y = freesp(ones(5,1),pos1,pos2,vel1,vel2);
disp(y)1.0e-03 * 0.0126 - 0.1061i 0.0117 - 0.1083i 0.0105 - 0.1085i 0.0094 - 0.1086i 0.0082 - 0.1087i
Because the transmitted amplitude is unity, the square of the signal at the target equals the inverse of the loss.
disp(1/abs(y(2))^2)
8.4206e+07
Create a uniform linear array (ULA) consisting of four short-dipole antenna elements that support polarization. Set the orientation of each dipole to the z-direction. Set the operating frequency to 300 MHz and the element spacing of the array to 0.4 meters. While the antenna element supports polarization, you must explicitly enable polarization in the Radiator System object™.
Create the short-dipole antenna element, ULA array, and radiator System objects. Set the CombineRadiatedSignals property to true to coherently combine the radiated signals from all antennas and the Polarization property to 'Combined' to process polarized waves.
freq = 300e6; nsensors = 4; c = physconst('LightSpeed'); antenna = phased.ShortDipoleAntennaElement('FrequencyRange',[100e6 900e6],... 'AxisDirection','Z'); array = phased.ULA('Element',antenna,... 'NumElements',nsensors,... 'ElementSpacing',0.4); radiator = phased.Radiator('Sensor',array,... 'PropagationSpeed',c,... 'OperatingFrequency',freq,... 'CombineRadiatedSignals',true,... 'Polarization','Combined',... 'WeightsInputPort',true);
Create a signal to be radiated. In this case, the signal consists of one cycle of a 4 kHz sinusoid. Set the signal amplitude to unity. Set the sampling frequency to 8 kHz. Choose radiating angles of 0 degrees azimuth and 20 degrees elevation. For polarization, you must set a local axes - in this case chosen to coincide with the global axes. Set uniform weights on the elements of the array.
fsig = 4000; fs = 8000; A = 1; t = [0:0.01:2]/fs; signal = A*sin(2*pi*fsig*t'); radiatingAngles = [0;20]; laxes = ones(3,3); y = radiator(signal,radiatingAngles,laxes,[1,1,1,1].'); disp(y)
X: [201×1 double]
Y: [201×1 double]
Z: [201×1 double]
The radiated signal is a struct containing the polarized field.
Use a FreeSpace System object to propagate the field from the origin to the destination.
propagator = phased.FreeSpace('PropagationSpeed',c,... 'OperatingFrequency',freq,... 'TwoWayPropagation',false,... 'SampleRate',fs);
Set the signal origin, signal origin velocity, signal destination, and signal destination velocity.
origin_pos = [0; 0; 0]; dest_pos = [500; 200; 50]; origin_vel = [10; 0; 0]; dest_vel = [0; 15; 0];
Call the FreeSpace object to propagate the signals.
yprop = propagator(y,origin_pos,dest_pos,...
origin_vel,dest_vel);Plot the x-component of the propagated signals.
figure
plot(1000*t,real(yprop.X))
xlabel('Time (millisec)')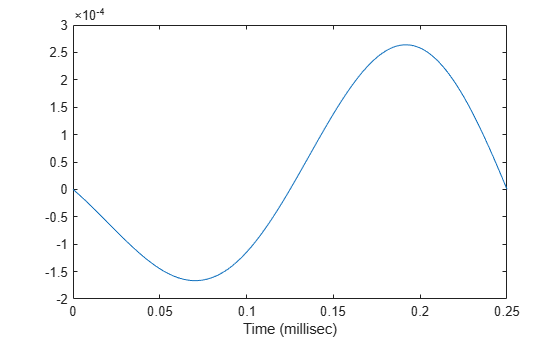
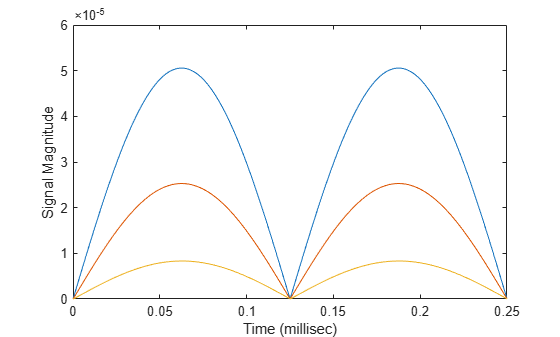
Create a FreeSpace System object™ to propagate a signal from one point to multiple points in space. Start by defining a signal origin and three destination points, all at different ranges.
Compute the propagation direction angles from the source to the destination locations. The source and destination are stationary.
pos1 = [0,0,0]'; vel1 = [0,0,0]'; pos2 = [[700;700;100],[1400;1400;200],2*[2100;2100;400]]; vel2 = zeros(size(pos2)); [rngs,radiatingAngles] = rangeangle(pos2,pos1);
Create the cosine antenna element, ULA array, and Radiator System objects.
fs = 8000; freq = 300e6; nsensors = 4; antenna = phased.CosineAntennaElement; array = phased.ULA('Element',antenna,'NumElements',nsensors); radiator = phased.Radiator('Sensor',array, ... 'OperatingFrequency',freq, ... 'CombineRadiatedSignals',true,'WeightsInputPort',true);
Create a signal to be one cycle of a sinusoid of amplitude one and having a frequency of 4 kHz.
fsig = 4000; t = [0:0.01:2]'/fs; signal = sin(2*pi*fsig*t);
Radiate the signals in the destination directions. Apply a uniform weighting to the array.
y = radiator(signal,radiatingAngles,[1,1,1,1].');
Propagate the signals to the destination points.
freesp = phased.FreeSpace('OperatingFrequency',freq,'SampleRate',fs); yprop = freesp(y,pos1,pos2,vel1,vel2);
Plot the propagated signal magnitudes for each range.
figure plot(1000*t,abs(yprop(:,1)),1000*t,abs(yprop(:,2)),1000*t,abs(yprop(:,3))) ylabel('Signal Magnitude') xlabel('Time (millisec)')
Algorithms
When the origin and destination are stationary relative to each other, you can write the output signal of a free-space channel as Y(t) = x(t-τ)/Lfsp. The quantity τ is the signal delay and Lfsp is the free-space path loss. The delay τ is given by R/c, where R is the propagation distance and c is the propagation speed. The free-space path loss is given by
where λ is the signal wavelength.
This formula assumes that the target is in the far field of the transmitting element or array. In the near field, the free-space path loss formula is not valid and can result in a loss smaller than one, equivalent to a signal gain. Therefore, the loss is set to unity for range values, R ≤ λ/4π.
When the origin and destination have relative motion, the processing also introduces a Doppler frequency shift. The frequency shift is v/λ for one-way propagation and 2v/λ for two-way propagation. The quantity v is the relative speed of the destination with respect to the origin.
For further details, see [2].
References
[1] Proakis, J. Digital Communications. New York: McGraw-Hill, 2001.
[2] Skolnik, M. Introduction to Radar Systems, 3rd Ed. New York: McGraw-Hill, 2001.
See Also
twoRayChannel (Radar Toolbox) | phased.WidebandFreeSpace