錐計画法を使用した区分線形マス-バネ システムのエネルギーの最小化 (ソルバーベース)
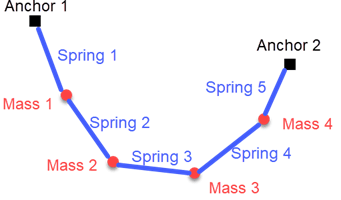
この例では、2 つの固定点からぶら下がっているマス-バネ システムの平衡位置を見つける方法を示します。バネには区分線形張力がかかります。系は、2 つの次元の 個の質量で構成されます。質量 はバネ とバネ に接続されます。バネ とバネ は別々の固定点に接続されます。この場合、バネ の 0 力長さは正の長さ で、バネは長さ に伸びたときに力 を発生させます。問題は、質量の最小位置エネルギー構成を見つけることです。ここで、位置エネルギーは、重力と非線形バネの伸びから生じます。平衡は、最小エネルギー構成で実現します。
この図は、2 つの固定点からつるされている 5 つのバネと 4 つの質量を示しています。
高さ における質量 の位置エネルギーは です。ここで、 は地球上の重力定数です。また、長さ に伸びた、バネ定数 の理想的な線形バネの位置エネルギーは です。現在のモデルは、バネが理想的ではありませんが、非ゼロの静止長 をもちます。
この例の数学的基礎は、Lobo、Vandenberg、Boyd、および Lebret [1] にあります。この例の問題ベースのバージョンについては、錐計画法を使用した区分線形マス-バネ システムのエネルギーの最小化、問題ベースを参照してください。
数学的定式化
質量 の位置は、水平座標が で、垂直座標が の です。質量 は、 の重力による位置エネルギーをもちます。バネ の位置エネルギーは です。ここで、 は、質量 と質量 間のバネの長さです。固定点 1 を質量 0 の位置として、固定点 2 を質量 の位置としてとります。前述のエネルギー計算は、バネ の位置エネルギーが以下であることを示しています。
.
この位置エネルギー問題を 2 次錐問題として再定式化するには、Lobo [1] で説明されているように、いくつかの新しい変数の導入が必要です。項 の平方根に等しい変数 を作成します。
を単位列ベクトル とします。すると、 になります。問題は次のようになります。
(1)
ここで、 を、 の以前の方程式で与えるのではなく、自由ベクトル変数と見なします。 と の関係を次の錐制約の新しいセットに組み込みます。
(2)
目的関数は、まだ、coneprog に規定されているように、変数内で線形ではありません。新しいスカラー変数 を導入します。不等式 は次の不等式と同等であることに注意してください。
.(3)
ここで、問題は、次を最小化することです。
(4)
これは、(2) に記載されている と に対する錐制約と追加の錐制約 (3) の影響を受けます。錐制約 (3) は であることを確保します。したがって、問題 (4) は問題 (1) と同等です。
問題 (4) の目的関数と錐制約は coneprog を使用した解法に適しています。
MATLAB® での定式化
6 つのバネ制約 、6 つの長さ制約 、および 5 つの質量 を定義します。
k = 40*(1:6); l = [1 1/2 1 2 1 1/2]; m = [2 1 3 2 1];
地球 に対する近似重力定数を定義します。
g = 9.807;
最適化用の変数は、 ベクトルの 10 個の成分、 ベクトルの 6 つの成分、および 変数です。v をこのすべての変数を含むベクトルとします。
[v(1),v(2)]は 2 次元変数 に対応します。[v(3),v(4)]は 2 次元変数 に対応します。[v(5),v(6)]は 2 次元変数 に対応します。[v(7),v(8)]は 2 次元変数 に対応します。[v(9),v(10)]は 2 次元変数 に対応します。[v(11):v(16)]は 6 次元ベクトル に対応します。v(17)はスカラー変数 に対応します。
これらの変数を使用して、対応する目的関数ベクトル f を作成します。
f = zeros(size(m)); f = [f;g*m]; f = f(:); f = [f;zeros(length(k)+1,1)]; f(end) = 1;
次の質量 (2) 間のバネに相当する錐制約を作成します。
.
coneprog ソルバーは、次の形式の変数ベクトル の錐制約を使用します。
.
次のコードでは、Asc 行列が bsc = [0;0] の項 を表しています。錐変数 dsc = と対応する gamma =
d = zeros(1,length(f)); Asc = d; Asc([1 3]) = [1 -1]; A2 = circshift(Asc,1); Asc = [Asc;A2]; ml = length(m); dbase = 2*ml; bsc = [0;0]; for i = 2:ml gamma = -l(i); dsc = d; dsc(dbase + i) = sqrt(2/k(i)); conecons(i) = secondordercone(Asc,bsc,dsc,gamma); Asc = circshift(Asc,2,2); end
前述のコードで示したように、先端質量の位置に固定点を使用することによって、先端質量と固定点の間のバネに相当する錐制約を作成します。
x0 = [0;5]; xn = [5;4]; Asc = zeros(size(Asc)); Asc(1,(dbase-1)) = 1; Asc(2,dbase) = 1; bsc = xn; gamma = -l(ml); dsc = d; dsc(dbase + ml) = sqrt(2/k(ml)); conecons(ml + 1) = secondordercone(Asc,bsc,dsc,gamma); Asc = zeros(size(Asc)); Asc(1,1) = 1; Asc(2,2) = 1; bsc = x0; gamma = -l(1); dsc = d; dsc(dbase + 1) = sqrt(2/k(1)); conecons(1) = secondordercone(Asc,bsc,dsc,gamma);
次の 変数に相当する錐制約 (3) を作成します。
これは、行列 Asc を作成することによって行います。この行列は、v ベクトルを乗算すると、ベクトル が得られます。bsc ベクトルは、項 内の定数 1 に対応します。dsc ベクトルは、v を乗算すると、 を返します。また、gamma = です。
Asc = 2*eye(length(f)); Asc(1:dbase,:) = []; Asc(end,end) = -1; bsc = zeros(size(Asc,1),1); bsc(end) = -1; dsc = d; dsc(end) = 1; gamma = -1; conecons(ml+2) = secondordercone(Asc,bsc,dsc,gamma);
最後に、 変数と 変数に対応する下限を作成します。
lb = -inf(size(f)); lb(dbase+1:end) = 0;
問題の解決と解のプロット
問題の定式化は完了です。coneprog を呼び出して問題を解きます。
[v,fval,exitflag,output] = coneprog(f,conecons,[],[],[],[],lb);
Optimal solution found.
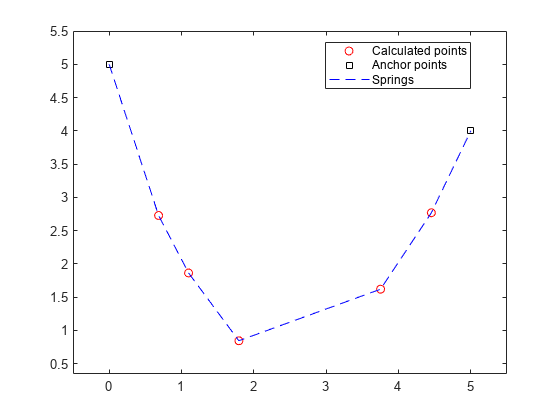
解の点とアンカーをプロットします。
pp = v(1:2*ml); pp = reshape(pp,2,[]); pp = pp'; plot(pp(:,1),pp(:,2),"ro") hold on xx = [x0,xn]'; plot(xx(:,1),xx(:,2),"ks") xlim([x0(1)-0.5,xn(1)+0.5]) ylim([min(pp(:,2))-0.5,max(x0(2),xn(2))+0.5]) xxx = [x0';pp;xn']; plot(xxx(:,1),xxx(:,2),"b--") legend("Calculated points","Anchor points","Springs",Location="best") hold off
パラメーターの m、l、および k の値を変更して、それらがどのように解に影響するかを確認します。質量の数を変更することもできます。コードは、入力されたデータから質量の数を抽出します。
参考文献
[1] Lobo, Miguel Sousa, Lieven Vandenberghe, Stephen Boyd, and Hervé Lebret.“Applications of Second-Order Cone Programming.”Linear Algebra and Its Applications 284, no. 1–3 (November 1998):193–228. https://doi.org/10.1016/S0024-3795(98)10032-0.