ハイブリッド A* を使用したパス プランニング用のコードの生成
この例では、ハイブリッド A* アルゴリズムを使用して、マップを介してビークルの衝突のないパスを計画するためにコード生成を実行する方法について説明します。MATLAB® でアルゴリズムを検証した後に、関数codegen (MATLAB Coder)を使用して MEX 関数を生成します。アルゴリズムで生成された MEX ファイルを使用して、計画されたパスを可視化します。
パスを計画するアルゴリズムの作成
plannerHybridAStarオブジェクトを使用して、マップで開始姿勢からゴール姿勢までのパスを計画する関数 codegenPathPlanner を作成します。
function path = codegenPathPlanner(mapData,startPose,goalPose) %#codegen % Create a binary occupancy map map = binaryOccupancyMap(mapData); % Create a state space object stateSpace = stateSpaceSE2; % Update state space bounds to be the same as map limits. stateSpace.StateBounds = [map.XWorldLimits;map.YWorldLimits;[-pi pi]]; % Construct a state validator object using the statespace and map object validator = validatorOccupancyMap(stateSpace,Map=map); % Set the validation distance for the validator validator.ValidationDistance = 0.01; % Assign the state validator object to the plannerHybridAStar object planner = plannerHybridAStar(validator); % Compute a path for the given start and goal poses pathObj = plan(planner,startPose,goalPose); % Extract the path poses from the path object path = pathObj.States; end
この関数は、標準ハイブリッド A*パス プランニング呼び出しのラッパーの役割を果たします。標準入力を受け入れ、衝突のないパスを配列として返します。コード生成がサポートされる関数の入出力としてハンドル オブジェクトを使用することはできないため、関数内にプランナー オブジェクトを作成します。関数 codegenPathPlanner を現在のフォルダーに保存します。
MATLAB でのパス プランニング アルゴリズムの検証
コードを生成する前に MATLAB でパス プランニング アルゴリズムを検証します。
ランダムな 2 次元迷路マップを生成します。
map = mapMaze(5,MapSize=[25 25],MapResolution=1); mapData = occupancyMatrix(map);
開始姿勢とゴール姿勢を [x, y, theta] ベクトルとして定義します。"x" と "y" は位置をメートル単位で指定し、"theta" は向きの角度をラジアン単位で指定します。
startPose = [3 3 pi/2]; goalPose = [22 22 pi/2];
指定した開始姿勢、ゴール姿勢、およびマップについてパスを計画します。
path = codegenPathPlanner(mapData,startPose,goalPose);
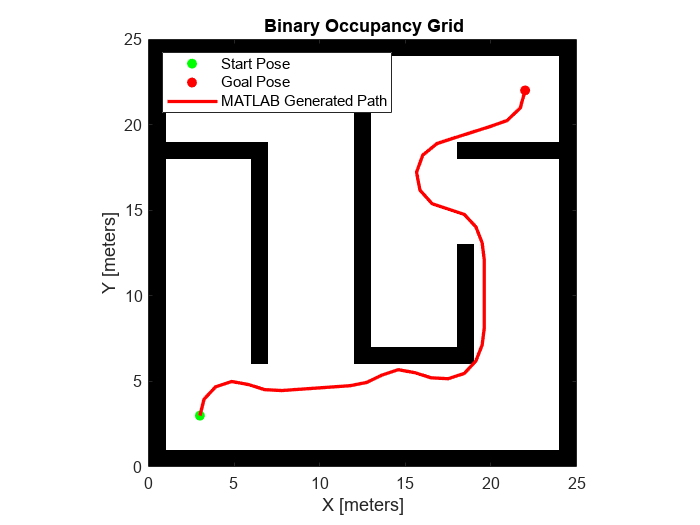
計算されたパスを可視化します。
show(binaryOccupancyMap(mapData)) hold on % Start state scatter(startPose(1,1),startPose(1,2),"g","filled") % Goal state scatter(goalPose(1,1),goalPose(1,2),"r","filled") % Path plot(path(:,1),path(:,2),"r-",LineWidth=2) legend("Start Pose","Goal Pose","MATLAB Generated Path") legend(Location="northwest")
パス プランニング アルゴリズムのコード生成
関数codegen (MATLAB Coder)またはMATLAB Coder (MATLAB Coder)アプリを使用してコードを生成できます。この例では、MATLAB コマンド ラインで codegen を呼び出して MEX ファイルを生成します。-args オプションおよび func_inputs 入力引数を使用して、関数への各入力のサンプル入力引数を指定します。
関数 codegen を呼び出し、cell 配列で入力引数を指定します。この関数により、別個の関数 codegenPathPlanner_mex が作成されて使用されます。options 入力引数を使用して C コードを生成することもできます。この手順には時間がかかることがあります。
codegen -config:mex codegenPathPlanner -args {mapData,startPose,goalPose}
Code generation successful.
生成された MEX 関数を使用した結果の検証
指定した開始姿勢、ゴール姿勢、およびマップについてパス プランニング アルゴリズムの MEX バージョンを呼び出してパスを計画します。
mexPath = codegenPathPlanner_mex(mapData,startPose,goalPose);
パス プランニング アルゴリズムの MEX バージョンで計算されたパスを可視化します。
scatter(mexPath(:,1),mexPath(:,2),... Marker="o",... MarkerFaceColor="b",... MarkerEdgeColor="b") legend("Start Pose","Goal Pose","MATLAB Generated Path","MEX Generated Path") legend(Location="northwest") hold off

生成されたコードのパフォーマンスの確認
timeitを使用して、生成された MEX 関数の実行時間を元の関数の実行時間と比較します。
time = timeit(@() codegenPathPlanner(mapData,startPose,goalPose))
time = 0.3735
mexTime = timeit(@() codegenPathPlanner_mex(mapData,startPose,goalPose))
mexTime = 0.0474
time/mexTime
ans = 7.8872
この例では、MEX 関数の実行の方が 5 倍高速です。結果はシステムによって異なる可能性があります。
生成された MEX 関数を使用した新しいマップでのパスの計画
新しいマップで新しい開始姿勢とゴール姿勢についてパスを計画します。新しいマップのサイズは、MEX 関数の生成に使用したマップと同じでなければなりません。
ランダムな 2 次元迷路マップを生成します。
mapNew = mapMaze(5,MapSize=[25 25],MapResolution=1); mapDataNew = occupancyMatrix(mapNew);
開始姿勢とゴール姿勢を指定します。
startPoseNew = [22 3 pi/2]; goalPoseNew = [3 22 pi/2];
指定した開始姿勢、ゴール姿勢、およびマップについてパスを計画します。
pathNew = codegenPathPlanner_mex(mapDataNew,startPoseNew,goalPoseNew);
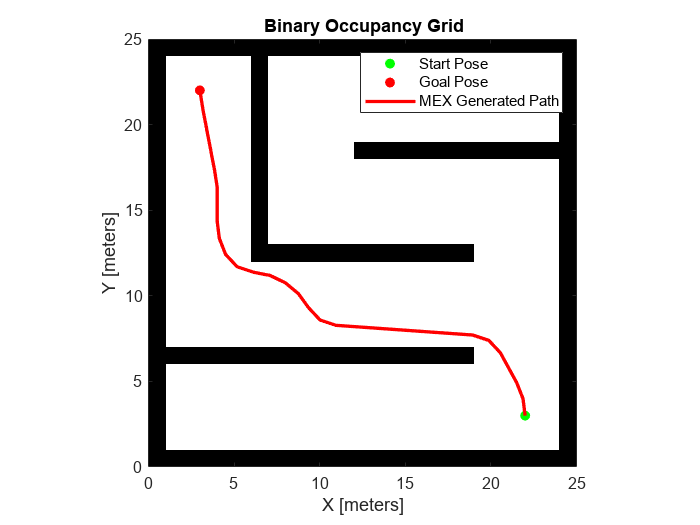
MEX 関数で計算された新しいパスを可視化します。
show(binaryOccupancyMap(mapDataNew)) hold on % Start state scatter(startPoseNew(1,1),startPoseNew(1,2),"g","filled") % Goal state scatter(goalPoseNew(1,1),goalPoseNew(1,2),"r","filled") % Path plot(pathNew(:,1),pathNew(:,2),"r-",LineWidth=2) legend("Start Pose","Goal Pose","MEX Generated Path") legend(Location='northeast')