copy
LiDAR SLAM オブジェクトをコピー
説明
newSlamObj = copy(slamObj)slamObj のディープ コピーを同じプロパティで作成します。newSlamObj に加えられた変更は、いずれも slamObj には反映されません。
例
lidarSLAM オブジェクトを作成します。
slamObj = lidarSLAM
slamObj =
lidarSLAM with properties:
PoseGraph: [1×1 poseGraph]
MapResolution: 20
MaxLidarRange: 8
OptimizationFcn: @optimizePoseGraph
LoopClosureThreshold: 100
LoopClosureSearchRadius: 8
LoopClosureMaxAttempts: 1
LoopClosureAutoRollback: 1
OptimizationInterval: 1
MovementThreshold: [0 0]
ScanRegistrationMethod: 'BranchAndBound'
TranslationSearchRange: [4 4]
RotationSearchRange: 1.5708
LiDAR SLAM オブジェクトのコピーを作成します。
slamObjNew = copy(slamObj)
slamObjNew =
lidarSLAM with properties:
PoseGraph: [1×1 poseGraph]
MapResolution: 20
MaxLidarRange: 8
OptimizationFcn: @optimizePoseGraph
LoopClosureThreshold: 100
LoopClosureSearchRadius: 8
LoopClosureMaxAttempts: 1
LoopClosureAutoRollback: 1
OptimizationInterval: 1
MovementThreshold: [0 0]
ScanRegistrationMethod: 'BranchAndBound'
TranslationSearchRange: [4 4]
RotationSearchRange: 1.5708
ファイルからレーザー スキャン データを読み込みます。
load("offlineSlamData.mat");SLAM アルゴリズムを設定するには、以下のようにします。
LiDAR の範囲、マップの分解能、ループ閉じ込みのしきい値および探索半径を指定します。
これらのパラメーターを、実際のロボットと環境に合わせて調整します。
次のパラメーターを指定して
lidarSLAMオブジェクトを作成します。
maxLidarRange = 8; mapResolution = 20; slamObj = lidarSLAM(mapResolution,maxLidarRange); slamObj.LoopClosureThreshold = 210; slamObj.LoopClosureSearchRadius = 8;
SLAM オブジェクトにスキャンを反復的に追加します。
for i = 1:numel(scans) addScan(slamObj,scans{i}); end
SLAM オブジェクトのコピーを作成します。SLAM オブジェクトの基となる姿勢グラフを表示します。
slamObj2 = copy(slamObj); slamObj2.PoseGraph
ans =
poseGraph with properties:
NumNodes: 71
NumEdges: 83
NumLoopClosureEdges: 13
LoopClosureEdgeIDs: [31 36 63 65 67 69 71 73 75 77 79 81 83]
LandmarkNodeIDs: [1×0 double]
エッジ ID を指定して最初の 2 つのループ閉じ込みを削除します。
lcEdgeIDs = slamObj2.PoseGraph.LoopClosureEdgeIDs(1:2); removeLoopClosures(slamObj2,lcEdgeIDs)
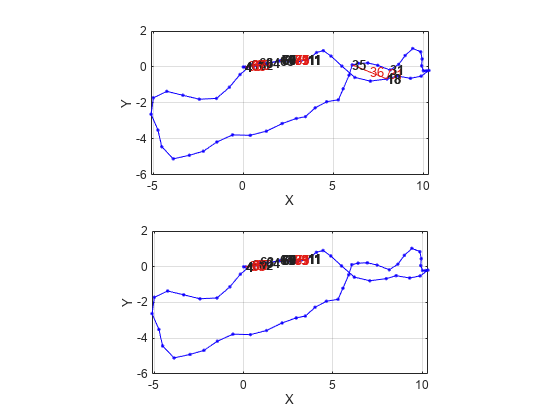
ループ閉じ込みを削除する前と削除した後に、SLAM オブジェクトの姿勢グラフをプロットします。
subplot(2,1,1) show(slamObj.PoseGraph); subplot(2,1,2) show(slamObj2.PoseGraph);
入力引数
出力引数
拡張機能
バージョン履歴
R2019b で導入