gyroparams
ジャイロスコープ センサー パラメーター
説明
gyroparams クラスは、ジャイロスコープ センサー パラメーター オブジェクトを作成します。imuSensor で IMU をシミュレートするときに、このオブジェクトを使用してジャイロスコープをモデル化できます。gyroparams モデル化の詳細については、imuSensor のAlgorithmsのセクションを参照してください。
作成
説明
params = gyroparams
params = gyroparams(Name,Value)Name,Value のペアの引数を使用して gyroparams オブジェクトのプロパティを構成します。Name はプロパティ名で、Value は対応する値です。Name は一重引用符 ('') で囲む必要があります。名前と値のペアの引数を複数、任意の順序で、Name1,Value1,...,NameN,ValueN のように指定できます。指定されていないプロパティはすべて既定値を取ります。
プロパティ
例
imuSensor オブジェクトのジャイロスコープ データを、定常入力から生成します。
センサーの最大読み取り値が 4.363 で分解能が 1.332e-4 のジャイロスコープ パラメーター オブジェクトを生成します。定数オフセット バイアスは 0.349 です。センサーのパワー スペクトル密度は 8.727e-4 です。温度によるバイアスは 0.349 です。温度によるスケール係数誤差は 0.02 % です。センサーの座標軸は 2 % せん断変形します。線形加速度によるセンサー バイアスは 0.178e-3 です。
params = gyroparams('MeasurementRange',4.363,'Resolution',1.332e-04,'ConstantBias',0.349,'NoiseDensity',8.727e-4,'TemperatureBias',0.349,'TemperatureScaleFactor',0.02,'AxesMisalignment',2,'AccelerationBias',0.178e-3);
100 Hz のサンプル レートを 1000 個のサンプルにわたり使用します。ジャイロスコープ パラメーター オブジェクトを使用して、imuSensor オブジェクトを作成します。
Fs = 100; numSamples = 1000; t = 0:1/Fs:(numSamples-1)/Fs; imu = imuSensor('accel-gyro','SampleRate', Fs, 'Gyroscope', params);
imuSensor オブジェクトからジャイロスコープ データを生成します。
orient = quaternion.ones(numSamples, 1); acc = zeros(numSamples, 3); angvel = zeros(numSamples, 3); [~, gyroData] = imu(acc, angvel, orient);
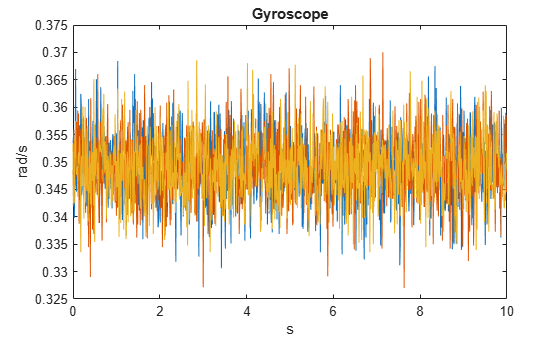
結果のジャイロスコープ データをプロットします。
plot(t, gyroData) title('Gyroscope') xlabel('s') ylabel('rad/s')