dubinsConnection
Dubins パス接続タイプ
説明
dubinsConnection オブジェクトは、姿勢間を接続する dubinsPathSegment パス セグメントを計算するための情報を保持します。Dubins パス セグメントは、2 つの姿勢を 3 つの運動のシーケンスとして接続します。運動オプションは、以下のとおりです。
直進
最大ステアリングで左折
最大ステアリングで右折
Dubins パス セグメントでは、前進方向の運動のみが許可されます。
この接続オブジェクトを使用して、最小回転半径やパス タイプのオプションなど、ロボット運動モデルのパラメーターを定義します。この接続タイプを使用して姿勢間のパス セグメントを生成するには、関数 connect を呼び出します。
作成
説明
dubConnObj = dubinsConnection
dubConnObj = dubinsConnection(Name,Value)
プロパティ
オブジェクト関数
connect | Connect poses for given connection type |
例
dubinsConnection オブジェクトを作成します。
dubConnObj = dubinsConnection;
開始姿勢とゴール姿勢を [x y theta] ベクトルとして定義します。
startPose = [0 0 0]; goalPose = [1 1 pi];
姿勢を接続する有効なパス セグメントを計算します。
[pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose);
生成されたパスを表示します。
show(pathSegObj{1})
dubinsConnection オブジェクトを作成します。
dubConnObj = dubinsConnection;
開始姿勢とゴール姿勢を [x y theta] ベクトルとして定義します。
startPose = [0 0 0]; goalPose = [1 1 pi];
姿勢を接続する有効なパス セグメントを計算します。
pathSegObj = connect(dubConnObj,startPose,goalPose);
生成されたパスを表示します。旋回の方向に注目してください。
show(pathSegObj{1})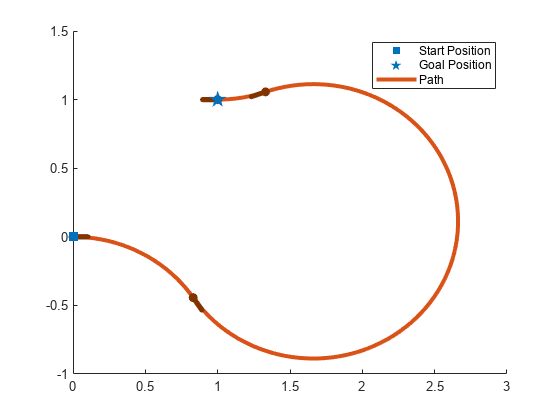
pathSegObj{1}.MotionTypesans = 1×3 cell
{'R'} {'L'} {'R'}
新しい接続オブジェクトでは、この特定の運動シーケンスを無効にします。ロボットが操縦しやすい場合は、MinTurningRadius を小さくします。姿勢を再度接続すると、異なるパスが得られます。
dubConnObj = dubinsConnection('DisabledPathTypes',{'RLR'}); dubConnObj.MinTurningRadius = 0.5; [pathSegObj, pathCosts] = connect(dubConnObj,startPose,goalPose); pathSegObj{1}.MotionTypes
ans = 1×3 cell
{'L'} {'S'} {'L'}
show(pathSegObj{1})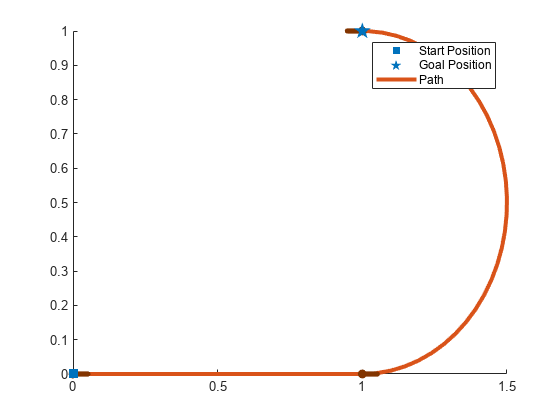
参照
[1] Shkel, Andrei M., and Vladimir Lumelsky. "Classification of the Dubins set." Robotics and Autonomous Systems. Vol. 34, No. 4, 2001, pp. 179–202.
拡張機能
バージョン履歴
R2019b で導入