モーターの相電流検出サブシステムと信号調整サブシステムの作成
物理的なハードウェアで、電流センサーによって読み取られたモーター電流はフィルター処理され、ADC 測定可能範囲にスケーリングされます。プロセッサの ADC 周辺装置によって電流信号が読み取られ、電流制御アルゴリズムの ADC カウントが出力されます。次の図は、モーターの相電流検出アルゴリズムと信号調整アルゴリズムをモデル化する方法の例を示しています。
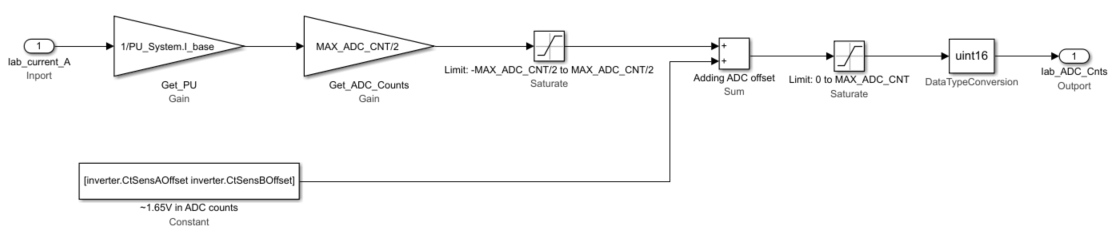
最大測定可能ピーク電流がベース電流と見なされます。ADC カウントは、次の方程式を使用して、ベース電流およびフルスケールの ADC 値と ADC オフセットから計算できます。
市販のインバーターに関する既定のインバーターおよび信号調整回路パラメーターについては、mcb.getInverterParameters.m ファイルを参照してください。新しいインバーター構成を追加するには、このファイルでインバーターのタイプを作成し、これをモデル初期化スクリプトで使用してパラメーターを初期化します。電流を測定するためにローパス フィルターを使用している場合は、平均モデルを追加して電流をフィルター処理します。