Id0 Estimator
Libraries:
Motor Control Blockset /
Parameter Estimation /
ACIM Parameter Estimation
Description
The Id0 Estimator block computes the magnetizing current of an induction motor using the phase currents and the test configuration elements.
The block runs the induction motor using open-loop control, during which it measures the peak current response values and averages them out over a given period. In addition, the block measures the time taken by the motor to reach from zero to 90 percent of the rated frequency. It uses this time duration as well as the computed average current to estimate the magnetizing current of the induction motor.
Examples
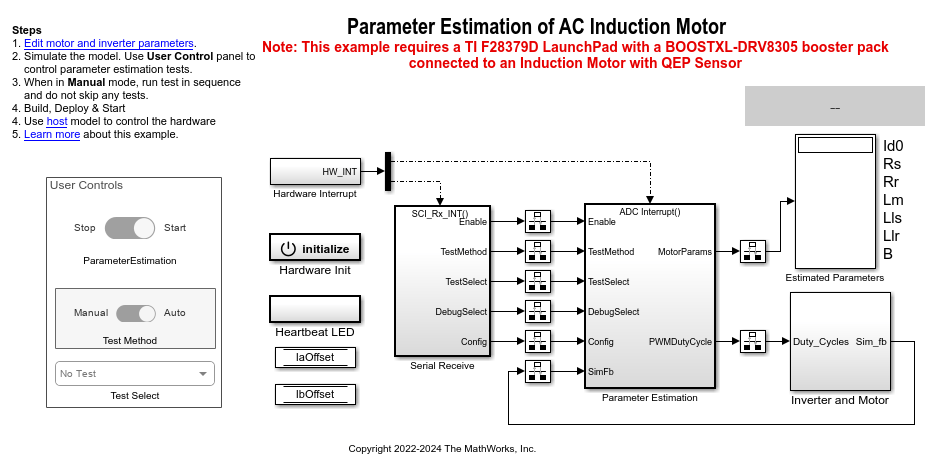
Estimate Induction Motor Parameters Using Parameter Estimation Blocks
Uses the parameter estimation blocks provided by Motor Control Blockset™ to estimate these parameters of an AC induction motor (ACIM):
Ports
Input
Output
Extended Capabilities
Version History
Introduced in R2023a