ACIM Rs Estimator
ライブラリ:
Motor Control Blockset /
Parameter Estimation /
ACIM Parameter Estimation
説明
ACIM Rs Estimator ブロックは、相電流、モーターにかかる DC 電圧、およびテスト構成要素を使用して誘導モーターの固定子の抵抗を計算します。
このブロックは、モーターの各相に電圧を供給し、電流応答を測定してモーターの抵抗を推定します。
例
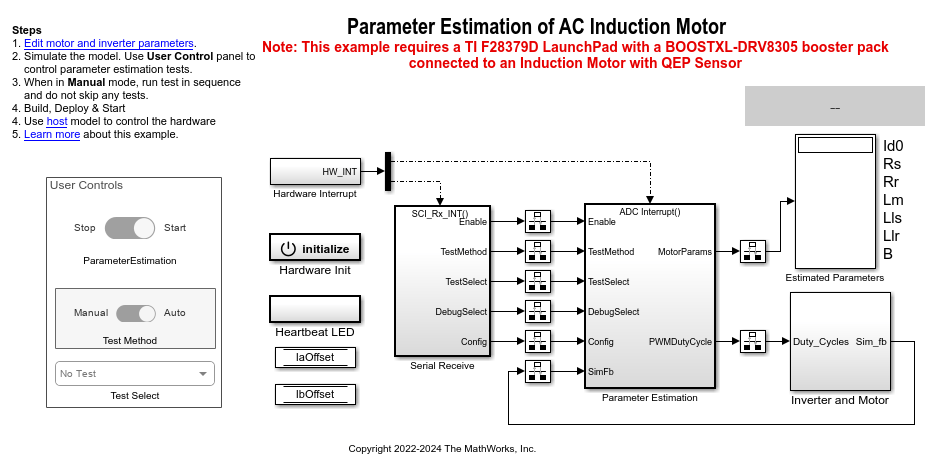
Estimate Induction Motor Parameters Using Parameter Estimation Blocks
Uses the parameter estimation blocks provided by Motor Control Blockset™ to estimate these parameters of an AC induction motor (ACIM):
端子
入力
出力
拡張機能
バージョン履歴
R2023a で導入